
作品名称井下巷道锚杆支护机器人
作品分类智能产品
参赛院校煤炭科学研究总院
指导老师郭治富
团队成员邓镓敏、吉庆、赵晨、高志强
奖项等级二等奖
竞赛年份2021
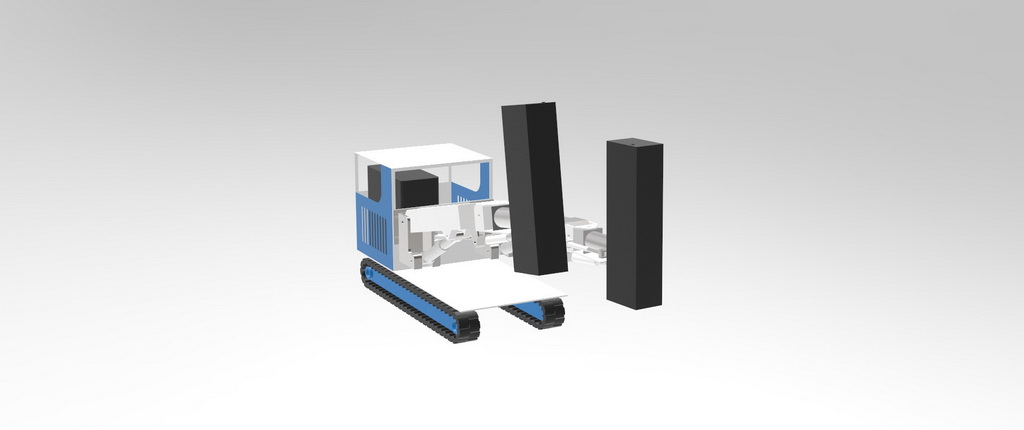
本作品针对井下巷道锚杆支护高度依赖人工的问题,结合井下巷道支护工艺,设计了一种井下巷道锚杆支护机器人。该机器人主要由车体、履带、履带架、泵站、操作台、六自由度工作臂、钻箱组成。六自由度工作臂和钻箱是锚杆支护机器人的核心工作部件。其中,钻箱搭载了单体锚杆钻机,并铰接与六自由度工作臂的末端,六自由度工作臂由液压驱动。工作时,六自由度工作臂运动使得钻箱到达指定位置进行锚杆支护作业,完成一根锚杆的安装之后,工作臂再次运动使钻箱完成下一个位置的锚杆支护作业。为了实现该功能,本作品首先基于锚杆支护机器人六自由度工作臂,使用分段多项式进行了轨迹规划,得到了六自由度工作臂的期望运动轨迹,然后使用PID算法得到了工作臂的运动控制算法,使工作臂可以按照期望运动轨迹工作,进而实现了锚杆支护机器人的自动作业。



