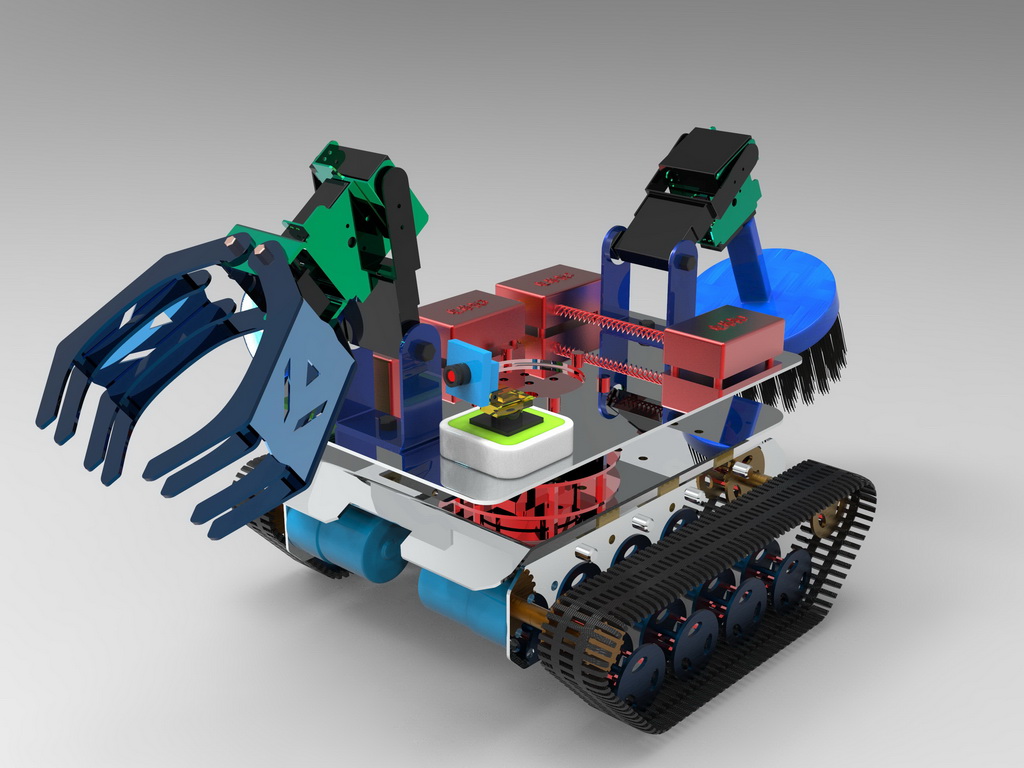
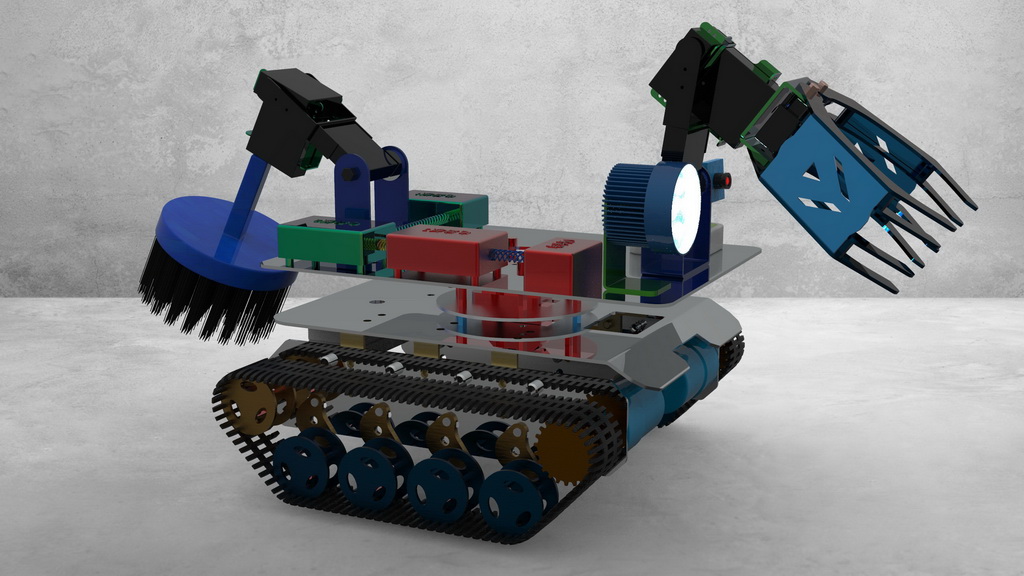
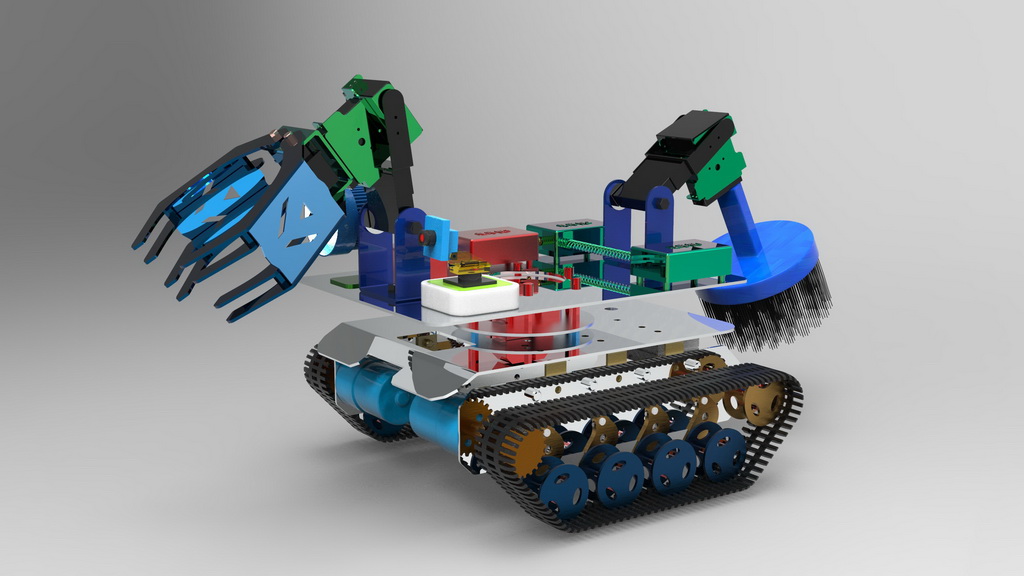
一、基本思路 本装置是在复杂的空调管道中能适应各种情况,并对其环境监测、进行清洗,同时检测病毒的存在,并通过智能决策是否对这一区域进行消毒,防止病毒的传播为一体的智能机器人。 疫情卫士主要由履带车本体、定心机构、清扫机构、弹性复位刷头、支撑限位机构等组成。其功能主要是由履带装置、螺旋升降机构、控制系统、尾翼导航定位装置四大部分共同实现。 本装置采用螺旋升降定心机构和伞状连杆机构同步运动,以及四个微动开关的反馈自动调节,可以实现本机器人的清洁臂在管道内的自适应展开到 最佳清扫工作位置,同时刷头的弹性复位可以使清洁刷与管壁始终平行接触,清扫面积保持最大。 通过清扫刷对灰尘的清理收集少量灰尘样本于机器之中并通过试剂检测甄别该区域是否符合安全条例,若不符合,便使用尾部的消毒喷洒装置进行消毒,确保该区域的无病毒化。 二、技术优势 机器人若要完成清理工作,就必须能够顺利通过弯管。机器人的弯管通过性与管道曲率半径、弯管角度、管道内径等参数密切相关,当参数确定时,过于细长或短粗的机器人都会发生卡死现象。 2.1消毒方式 该机器人可进行常规清扫作业,在特殊时期也能胜任病毒的检测与消毒功能。机器人会在收集灰尘与残留物时将灰尘样本放入检测盒中通过判断阴阳性给予终端是否消毒的判断依据,若检测为阳性,会接通电源将消毒液注入清扫装置并进行消毒。 2.2 齿轮履带传动 机器人工作时通过控制两电机的转速及转向来实现前进、后退及转弯。前进机构采用了履带装置便于定心过程中的左右原地调整,且传动平稳便于跨越管径变化带。 2.3 尾翼伞状连杆导航定位机构 尾部张臂采用柔性构件,展开过程中实时利用传感器进行检测张力,使三个尾端与管壁接触,进行清扫工作前的导航作用;在清扫过程中,尾端受力避免清扫过程中出现甩尾现象。 2.4 螺旋升降机构和刷头伞状连杆张开机构 在螺杆螺母传动中,螺杆为主动件,螺母为从动件,模拟雨伞撑开机构,中间丝杆就象伞上的主干,由螺套与之配合,由电机带动丝杆转动,从而实现螺套的直线运动来模拟人的手推开伞的过程。 三、创新点 1.科学性:自适应管径清扫 采用螺旋升降定心机构和伞状连杆机构同步运动,以及四个微动开关的反馈自动调节,可以实现本机器人的清洁臂在管道内的自适应展开到最佳清扫工作位置,同时刷头的弹性复位可以使清洁刷与管壁始终平行接触,清扫面积保持最大。 2.先进性:自动变管径清扫 在清扫过程中通过五个微动开关的不间断扫描采集信号,实时检测管径变化,根据反馈信号进行相应调节,实现跨越大小管径之间的智能变管径清扫。 3.发明点:一次性360°清扫 通过清扫刷的自适应展开,在清洁过程刷头始终与管壁接触,即达到旋转一周完成360°清扫效果,从而无需调整车身方向及位置。 4.创新点:病毒检测与消毒功能 通过清扫刷对灰尘的清理收集少量灰尘样本于机器之中并通过试剂检测甄别该区域是否符合安全条例,若不符合,便使用尾部的消毒喷洒装置进行消毒,确保该区域的无病毒化。
简“洁”智造——管道自适应清洁“芯”时代


作品名称简“洁”智造——管道自适应清洁“芯”时代
作品分类智能产品
参赛院校兰州理工大学
指导老师郭荣、王东伟
团队成员李浩森、靳晓东、吴蓉、王志邦、赵凯杰
奖项等级三等奖
竞赛年份2021



