

作品名称智能管道清洁机器人
作品分类智能产品
参赛院校盐城工学院
指导老师侯鹏亮、洪捐
团队成员王硕、温恩晗、张劲翼、姚如玮、顾卫国
奖项等级三等奖
竞赛年份2021
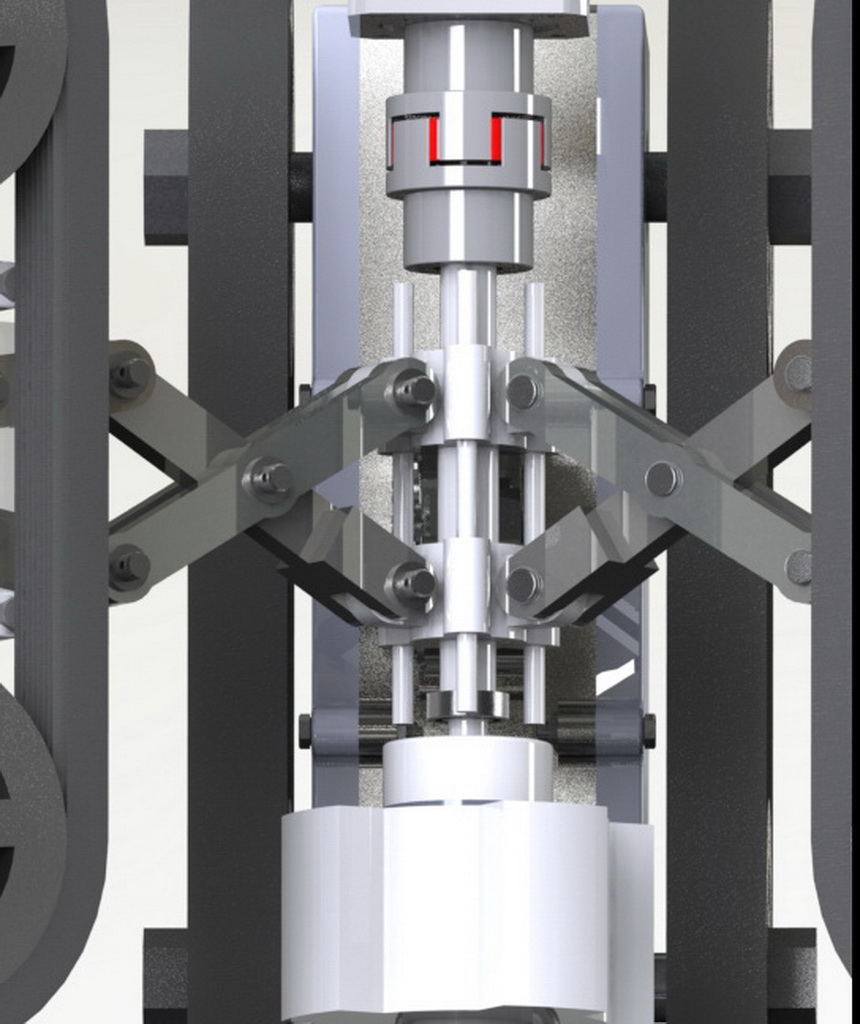
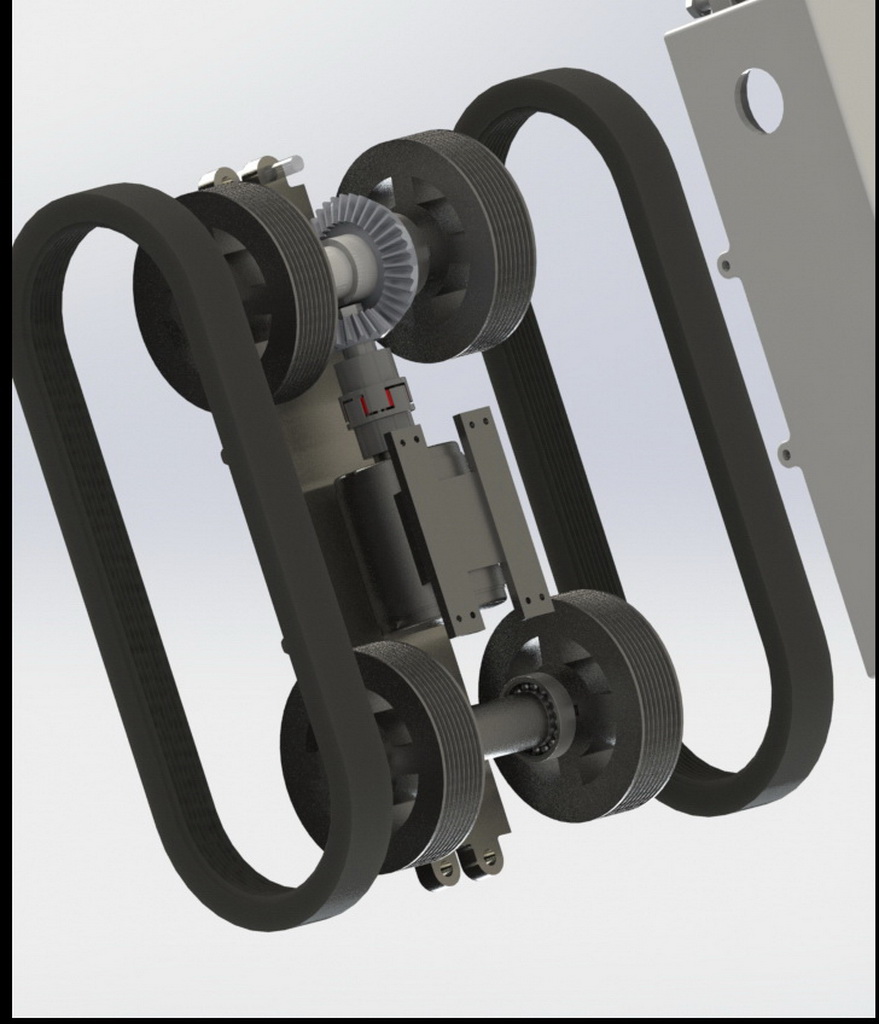
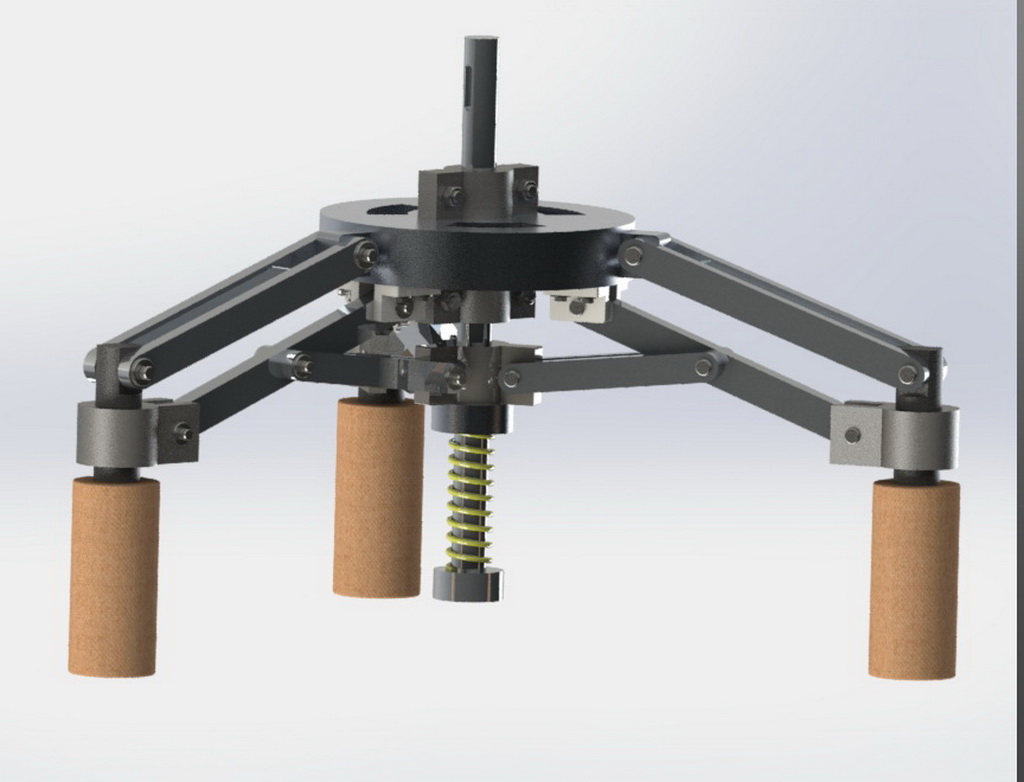
本作品在分析比较了许多同类产品的设计理念和特点后,针对圆形的中央空调通风管道清理灰尘难度大的特点,提出了对应的管道清洁机器人设计方案。 该管道清洁机器人选择履带传动作为移动方式,而且能够适应一定范围内变化的通风管道(800-900mm),与此同时,该管道清洁机器人还拥有不错的跨越障碍的能力。机器人主要由三个部分组成:移动单元,清洁单元,主体结构,每个部分采用模块化设计,为后续的改进和升级打下了良好基础。在设计过程中,为了满足对不同管径的适应需求,选择滚珠丝杠作为管道清洁机器人的变径机构,并对其他相关零部件进行选型设计和校核,然后完成管道清洁机器人的三维建模和仿真,最后对管道清洁机器人在管道内跨越障碍时的的运动状态和受力情况进行分析。



