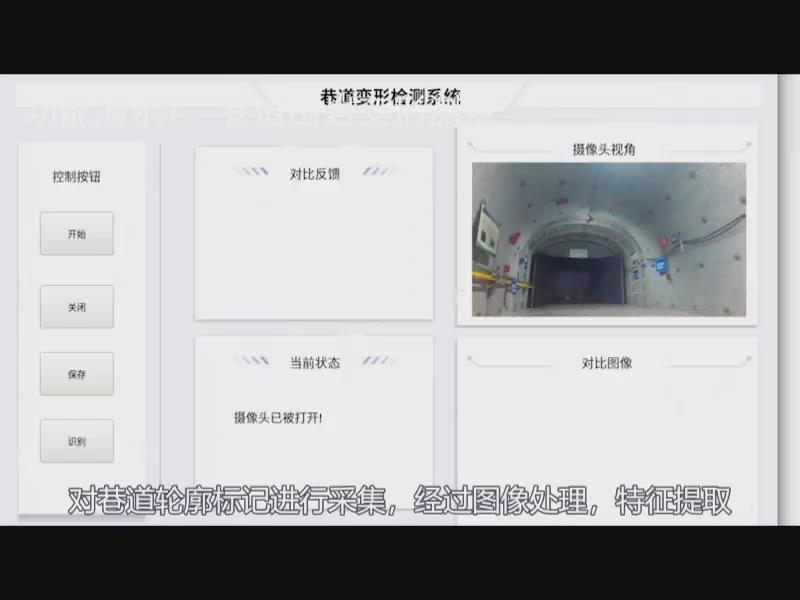
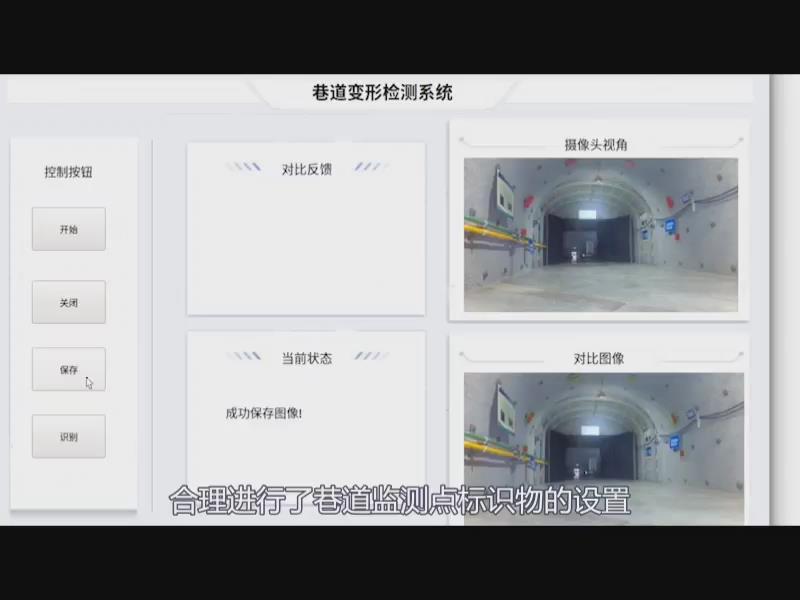
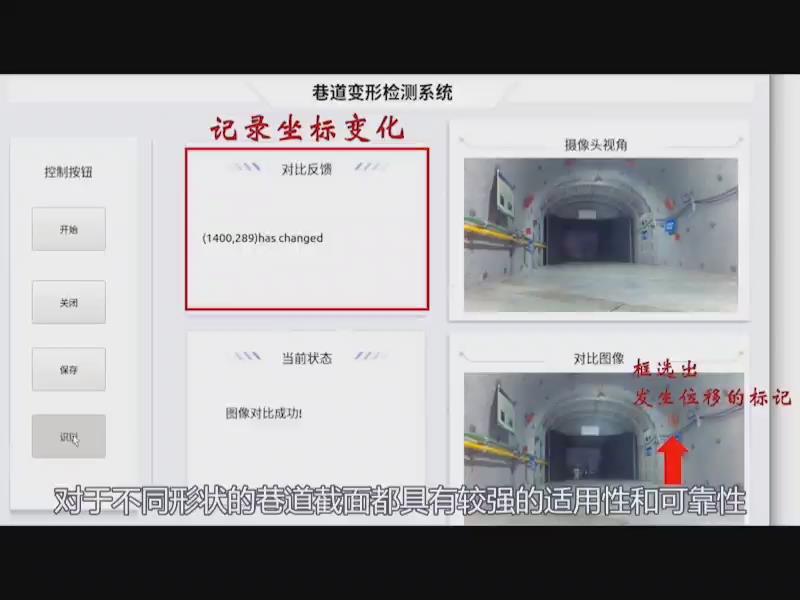
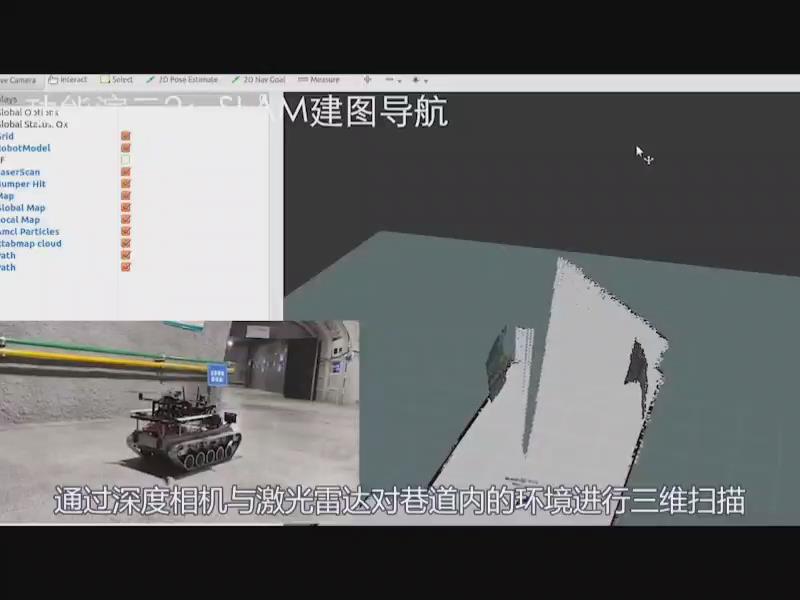
“防“危”杜渐—— 深地井巷工况智能巡检机器人”是一款适用于矿山井巷工程的以围岩监测为核心的多功能一体巡检设备,利用计算机视觉进行围岩形变监测,很大程度地解决了人工测量工序繁琐,现有围岩形变测量系统的布设工程量大、安装成本高等问题;机器人的运动机构采用履带式结构,具有良好的越障能力和地面适应性,配合激光SLAM和视觉SLAM,实现机器人在地下空间中的定位导航和避障功能,相比于轨道滑行式巡检类机器人运动路径的单一性,其自由度更高,更加灵活,可以在矿山井巷等更加复杂的特殊环境中进行巡查作业。搭载多种传感器,能够对巷道内的有毒有害气体浓度、温度等环境参数进行监测预警。该机器人具有巷道的围岩形变监测、地下空间建图和自动导航巡检、搭载传感器模块实时采集现场环境参数等功能,除了矿山井巷巡检工作外,也能够完成一些地下隧道、地下管廊等场景下的巡检工作。 1.产品功能 本产品是一款以巷道围岩监测为核心的多功能一体的侦查预警机器人,其适用于矿山井巷的巡检工作,具备地下空间建图定位、巷道围岩变形监测、危险气体监测、粉尘监测、火灾预警、越障等多种功能。 巷道围岩变形监测功能运用了计算机视觉图像处理方法、特征提取方法对地下巷道顶底板和两帮围岩变形进行监测。在机器人中应用了SLAM技术来实现定位导航和障碍检测功能,机器人在行进过程中能够绘制巷道内部的地图,直观展现巷道内的复杂空间状况,巷道地图的绘制是机器人完成自动巡检的基础。同时,机器人搭载的多种危险气体传感器,能够实时监测瓦斯、一氧化碳浓度等危险气体的浓度,在危险气体浓度异常的地段发出警告,并在地图上进行标记,发出预警。搭载红外摄像头采集温度视觉信息,检测巷道内热源,预防矿井火灾。本机器人采用无线网络信号控制,建图后可实现离线自动导航,能够替代人工完成井下巷道围岩变形检测以及危险环境侦察预警,最大限度的减少人力成本,降低安全风险,为矿山安全生产保驾护航。 2.产品科学性 关于SLAM同步建图导航技术: SLAM是同步建图与自主定位导航技术的统称,其还包含了多种不同原理的SLAM方法。其中全3维激光SLAM精度高,能够对所处环境进行全方位的扫描以及建图,但是其缺点在于重量和体积大,传回的激光数据量庞大,成本高(价格3-10万不等),近年来多用于地下空间领域的科研工作。而3维视觉SLAM较于全三维激光SLAM而言,其虽然精度不如后者,但也能较真实准确的反应地下空间内的三维环境。结合2维激光SLAM,即可满足机器人在地下的巡检工作需求。 关于视觉围岩变形测量: 利用视觉图像来对围岩形变进行检测并非首次提出,2020年的文章《井下巷道围岩变形快速精确监测系统及其监测方法与制作流程》中提出了一种利用固定相机来对已做好轮廓标记的巷道进行变形检测的装置。 该方法中,每一个巷道形变采集点都需要布设一个相机并且需要铺设通信线缆,故资源消耗量大,前期系统安装也十分繁琐。而地下空间作业环境侦查预警机器人中的视觉围岩检测功能是由一个模块化设备实现的,不同于独立的视觉围岩形变监测系统,模块主要作为巡检机器人的功能拓展模块使用,通过与激光SLAM技术等结合,即可实现摄像机(搭载在机器人上)在巷道中的精确定位,避免因为机器人停放点位和角度不同而产生明显的误差。 相比之下,本产品只需要一台相机便可完成对所有巷道形变采集点的采集任务,且前期准备工作仅仅只需要在巷道壁上做好标记,无需挂线、铺线,大大减少了资源和人力的投入,可以更快的将检测设备投入使用。由于都是通过对标记轮廓后的巷道截面进行图像采集,对巷道形变的解算原理基本相同,因此测量精度相当,为0.01m。 3.创新点 (1)基于 SLAM 即时定位与建图,SLAM 和 VSLAM 实现定位导航和监控空间变化的功能,能直观的展现空间内部形态。相比轨道式巡检机器人运动空间和路线的局限性,其自由度更高;相比精度高、成本高、体积和重量大的全三维激光 SLAM,其性价比更高。激光SLAM也是摄像机能够在巷道中进行位置、角度精确定位的保证。 (2)嵌入机器人的视觉模块通过高精度摄像机对巷道轮廓标记进行采集,经过图像处理,特征提取,数据库对比,进而解算出巷道的变形数据。这种围岩变形检测方法,很大程度地解决了人工测量工序繁琐的问题。仅用一台相机完成对所有巷道形变点的采集,相比现有围岩形变测量系统的布设,工程量更小、安装成本高等问题。采集的巷道轮廓存储于运算平台的数据库中,在下一次对同一截面进行轮廓采集时,进行对比,以此判断巷道是否发生了形变。数据库中的巷道变形数据还用于特征模型的学习优化,提升特征提取的精度。
防“危”杜渐—— 深地井巷工况智能巡检机器人




作品名称防“危”杜渐—— 深地井巷工况智能巡检机器人
作品分类智能产品
参赛院校山东科技大学
指导老师栾恒杰、陈莹莹
团队成员隋金洋、武恒、李汶津、李达、刘尚佳
奖项等级一等奖
竞赛年份2022



