作品名称管道清理机器人
作品分类智能产品
参赛院校绵阳职业技术学院
指导老师任震宇、王建平
团队成员景建国、王玉宏、谯蓉、代义苹、黄东海
奖项等级二等奖
竞赛年份2022
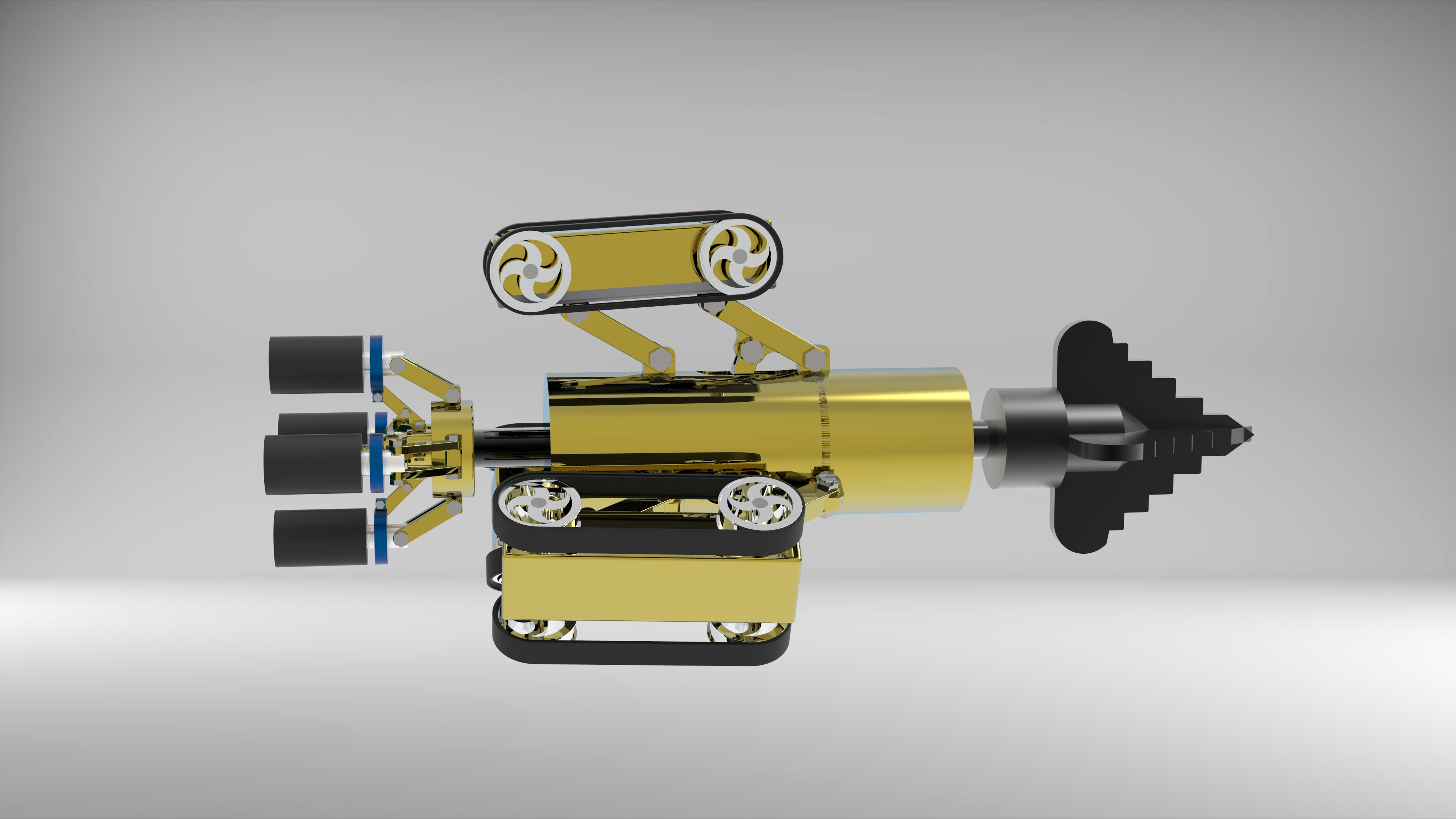
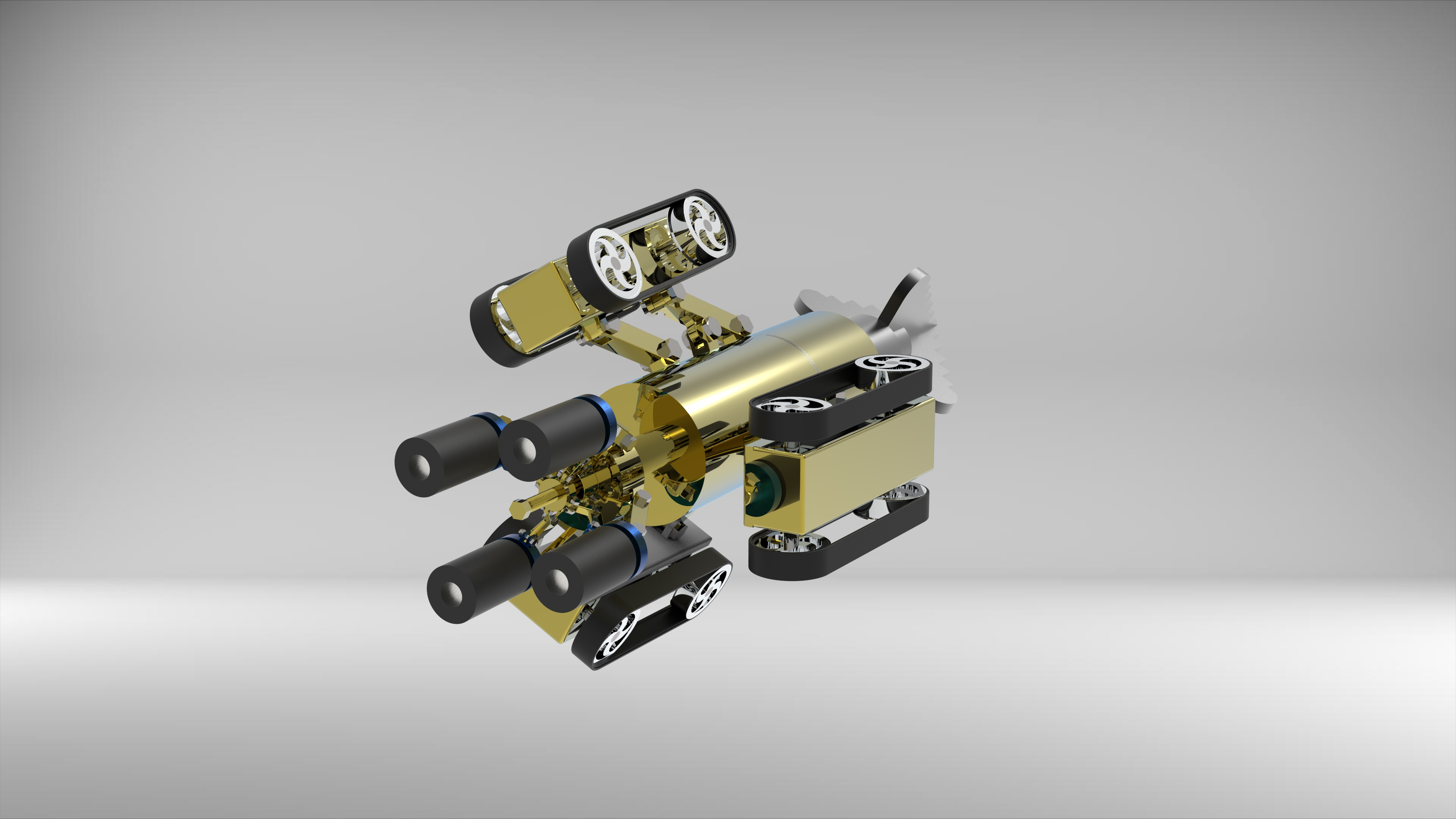
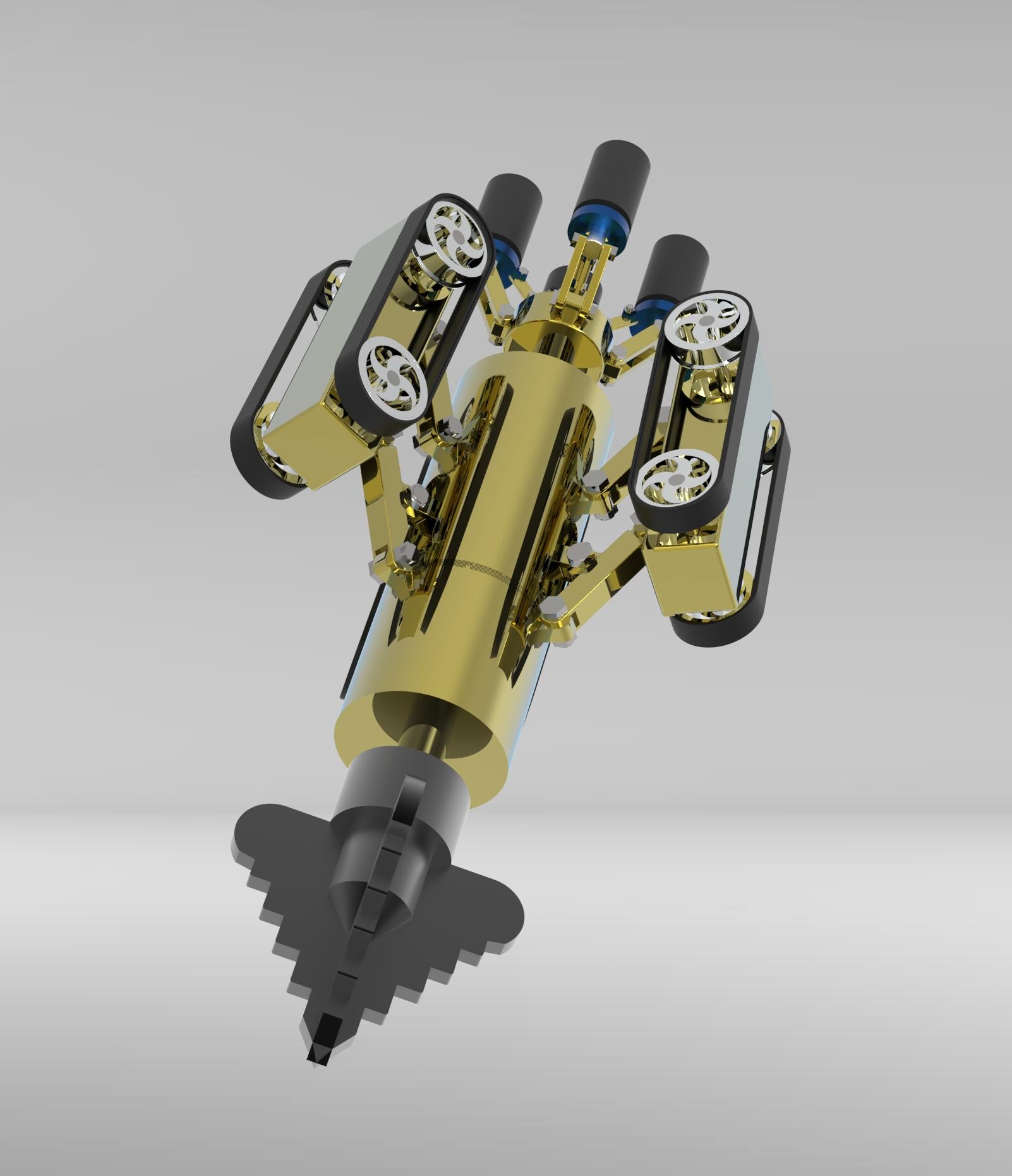
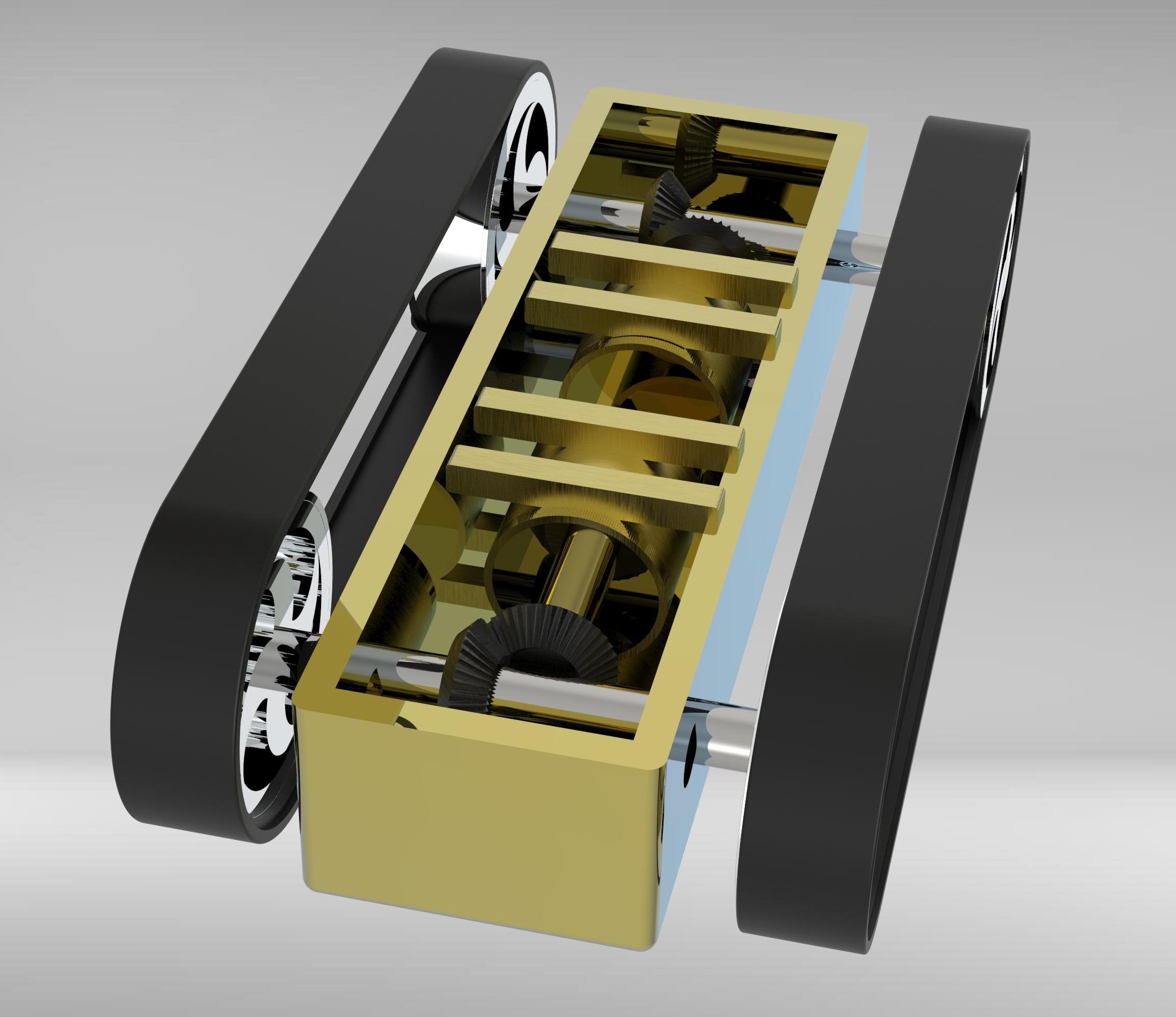
本产品是经过市场的考察和实地调研,综合设计出来的一款全方面管道机器人。该管道清理机器人的移动方式选择的是履带传动,移动方式能够自动伸缩的原理,保证具有足够的动力;当管道前面遇到堵塞情况,此时前面的钻头自动启动能快速解决这个问题,后面部分参用了自动伸缩的原理从而使毛刷能够更好的清理掉附着在管道璧上面的垃圾。 管道清理机器人主要是由四个单元组成:疏通单元、主体结构单元、移动单元、清理单元。其中优点主要是:1、管道机器人采用的是远程操控,且装有红外线探测仪,可以将它在运行过程中遇到的各种情况,实时反映在操作人员电脑上并做出各种应对措施。2、管道机器人由于身体结构、动力驱动和运动形式的原因,使它可以完成各种复杂的运动,从而可以完成各种管道内的清理作业。3、由于机器人结构简单轻巧,使用方便的结构特点,能使它在管道里方便移动。综上所述该管道清理机器人能够适合各种各样的管道垃圾清理。



