









作品名称串联式管道探伤修复机器人
作品分类智能产品
参赛院校西安科技大学
指导老师王鹏
团队成员许骏霄、王浩博、张贵冬、张新卓
奖项等级国赛一等奖
竞赛年份2023
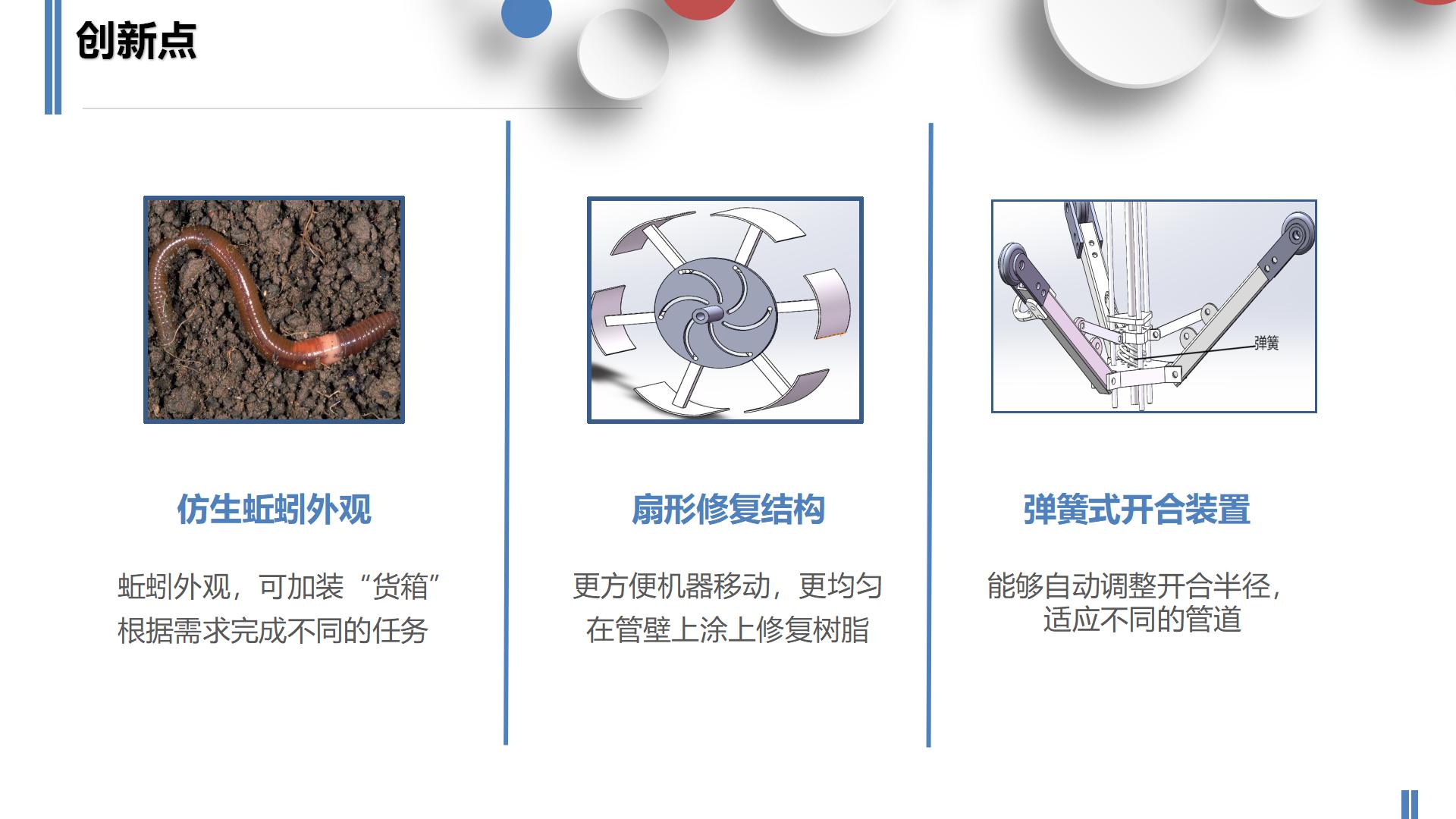
鉴于焊缝、腐蚀等因素,管道缺陷问题无法避免,国内外目前存在管道修复工作人力劳动强度大、效率低下的情况。因此,迫切需要一个基于机器人技术的自动高效探伤与修复方案。本项目创新地研发了一种串联式管道探伤修复机器人,旨在解决管道修复不便、效率低等问题。该机器人的主要构成部分包括:探伤部分,用于自动识别管道损伤;修复部分,采用紫外线灯固化树脂修补受损部位;控制部分,采用激光雷达进行精确控制;供能部分,搭载直流电源并具备无线充电功能,以确保机器人能够长时间可靠运行。项目的技术方案创新且可行,并且团队成员拥有相关研发经验,能够确保项目的顺利实施。



