

















作品名称驭漆险涂——全高危喷涂场景变曲率自适应仿生爬壁机器人
作品分类智能产品
参赛院校河南理工大学
指导老师邓小玲、苗鑫
团队成员石君昊、刘祝烨、程思远、王颜菽、郝志鹏
奖项等级国赛一等奖
竞赛年份2024
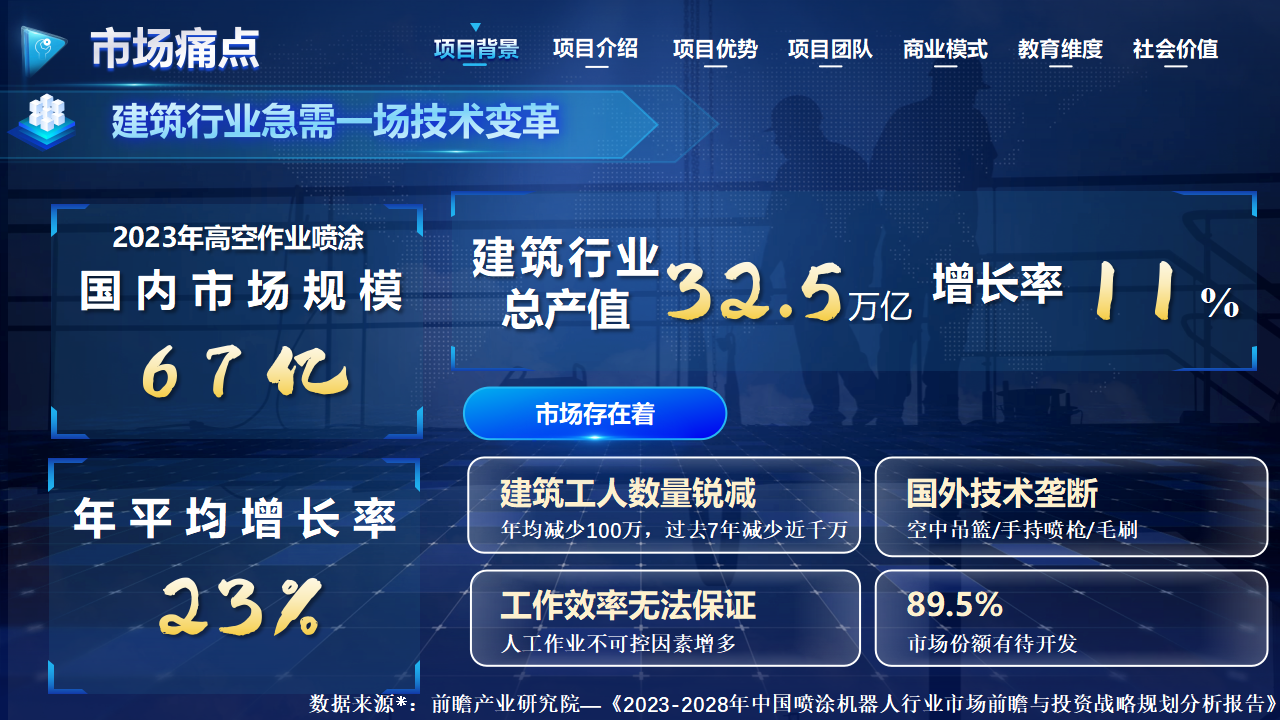
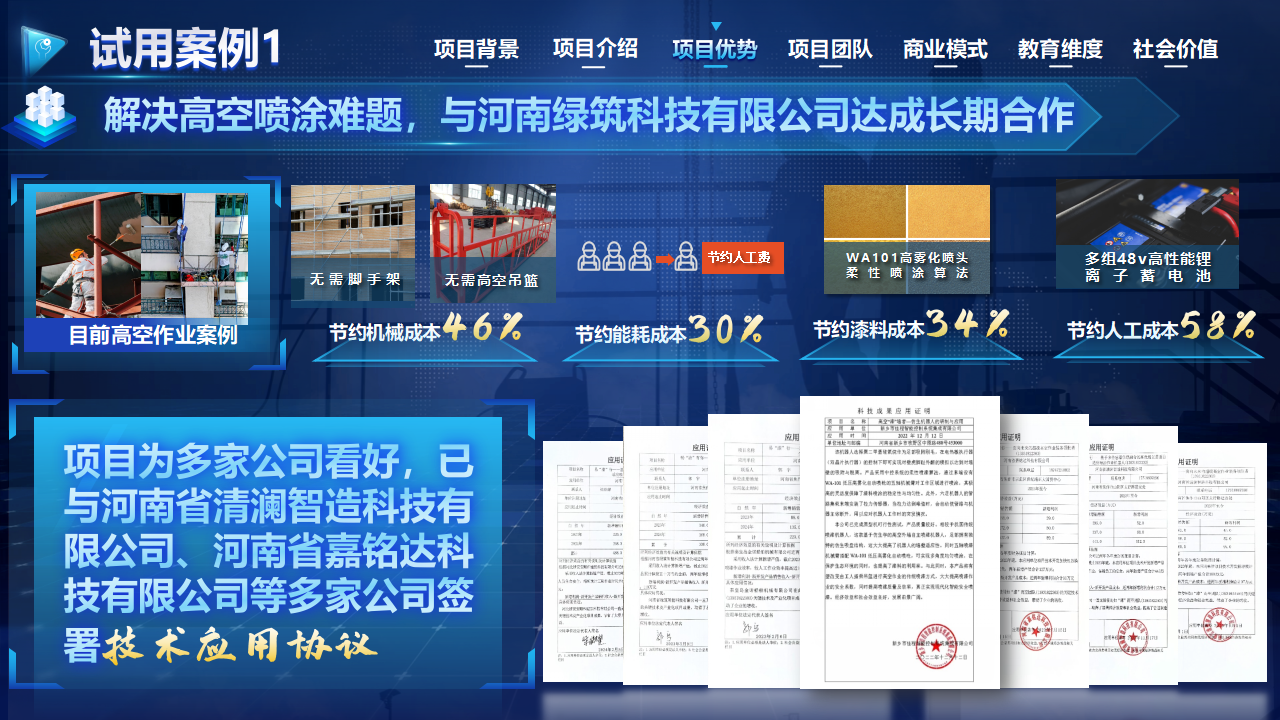
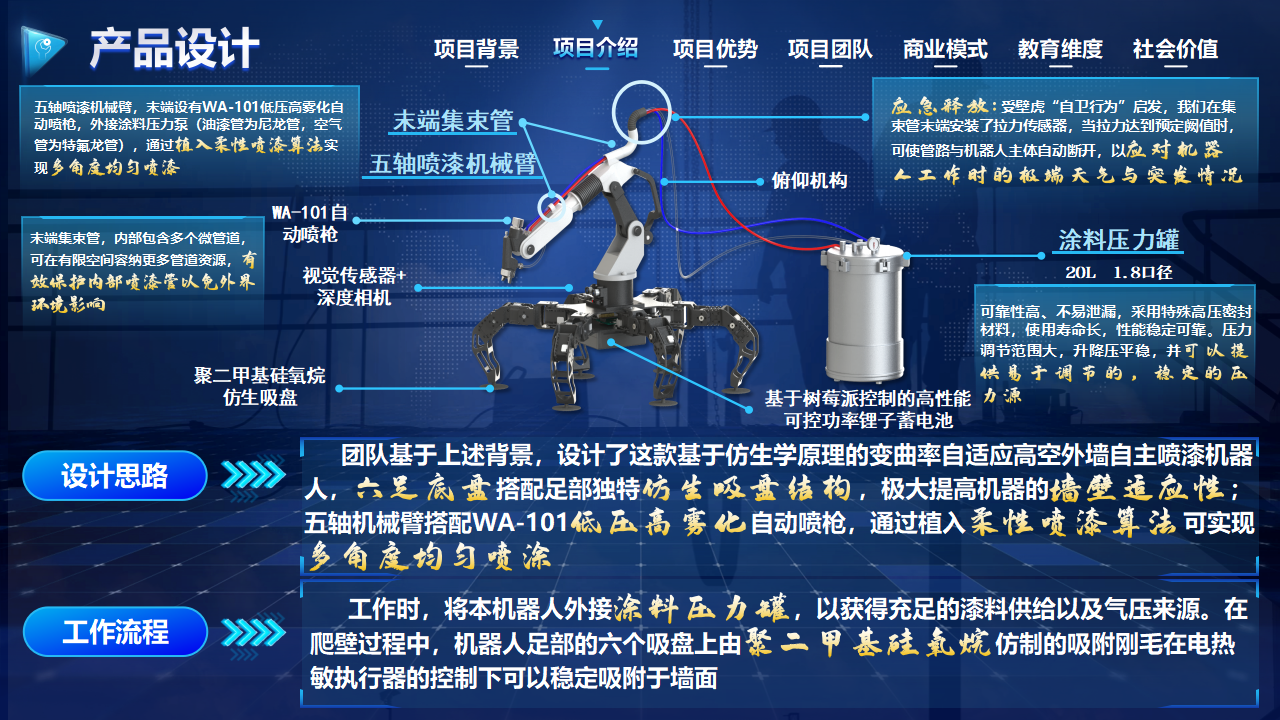
团队基于现有高空喷漆行业中喷漆作业自动化程度低、喷漆效率和质量不可控、喷漆作业工人个人安全无法得到保障等问题,设计了一款现代化高空外墙智能喷漆机器人,本机器人整体采用仿昆虫的结构,驱动力主要由电机提供,供能装置选择高性能锂离子蓄电池。作品基于仿生学技术设计,利用吸附刚毛和电热敏执行器实现爬壁功能,喷漆方面则采用末端设有工业级空气雾化喷枪的五轴机械臂,令其拥有较高的工作效率和灵活性,并且适应危险复杂环境下的喷漆作业,有效保障了喷漆行业从业人员的安全。同时有望改变传统喷漆效率低,质量差的局面。



