


作品名称感知视界——新一代基于机器视觉的多功能仿生机器人中国方案缔造者
作品分类智能产品
参赛院校贵州大学、河北大学、西北政法大学、四川文理学院、长春科技学院
指导老师吴静
团队成员王伟硕、武炎炎、孙语汐、屈晴川、徐潇雨
奖项等级国赛一等奖
竞赛年份2024
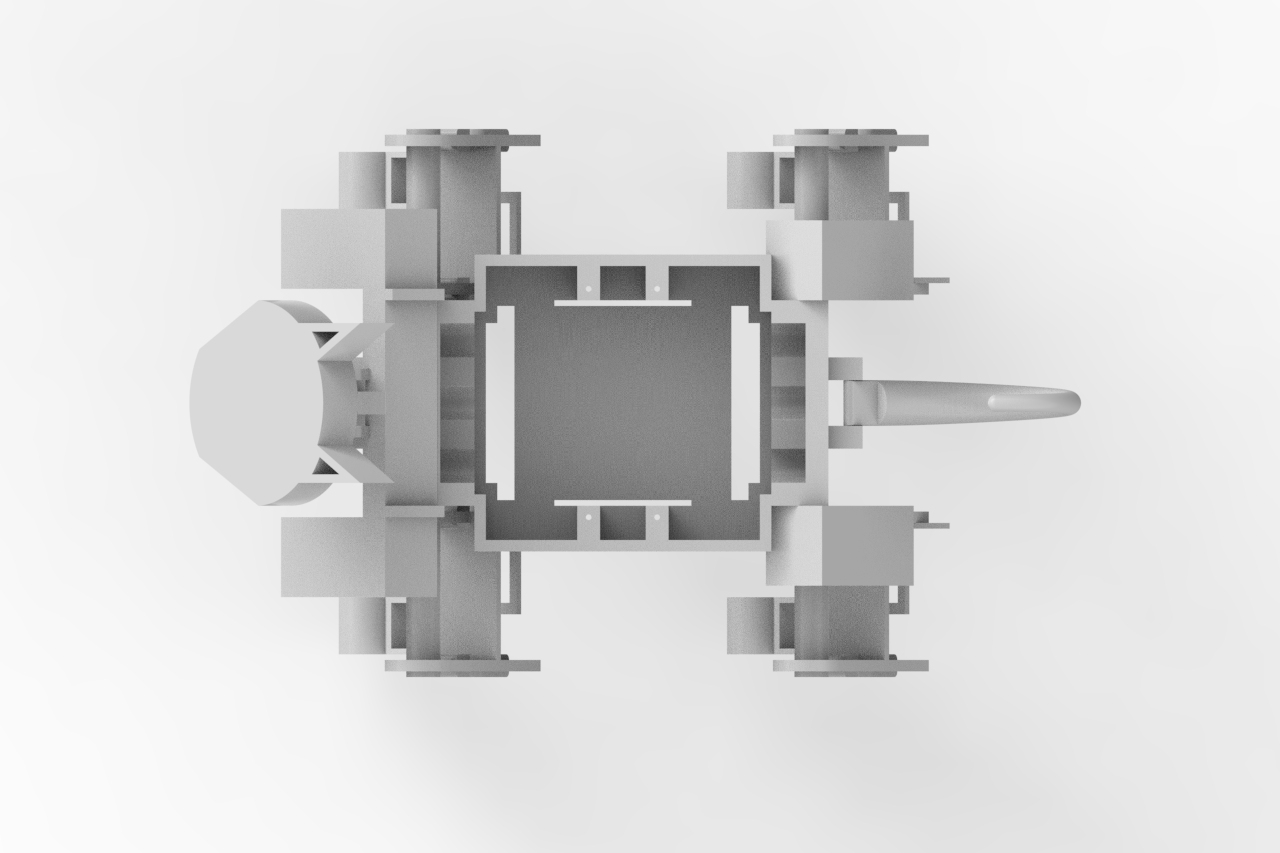
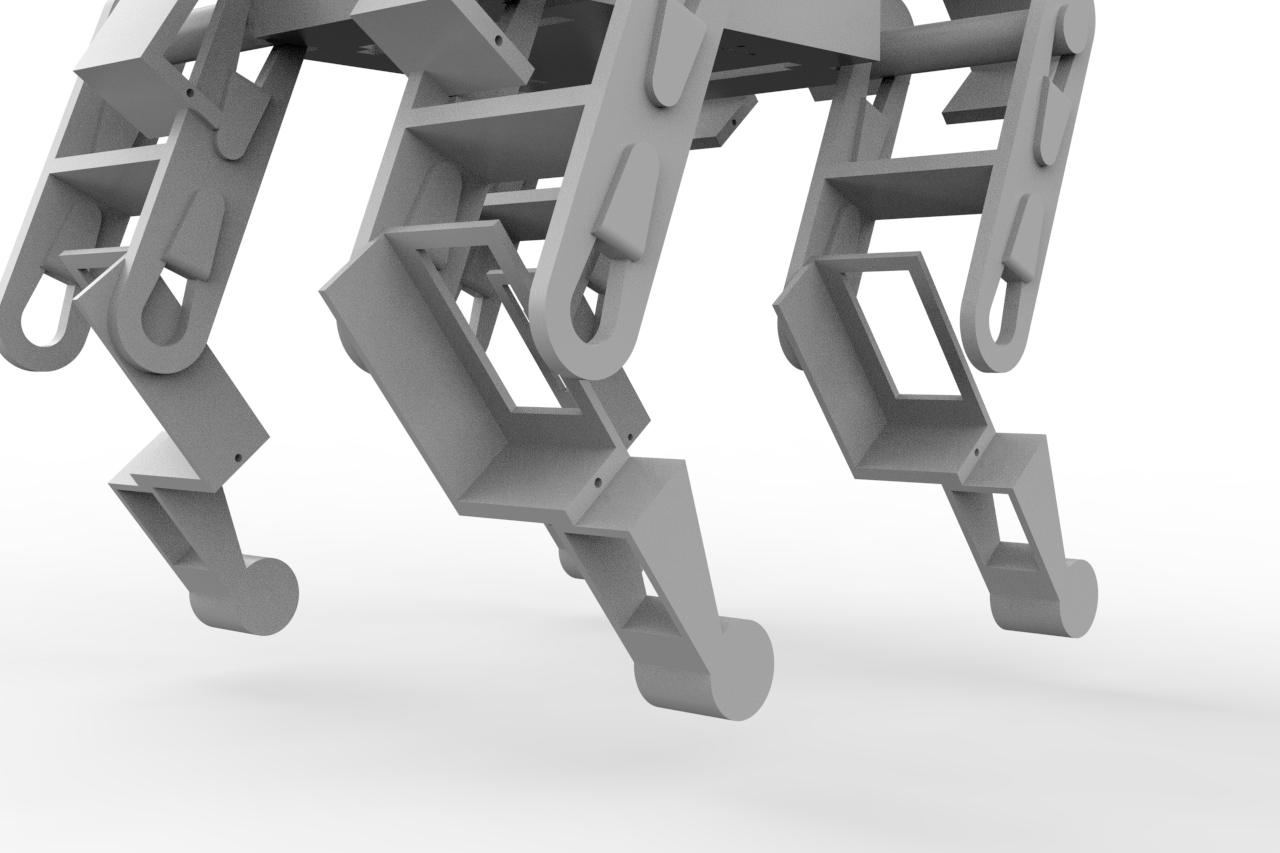
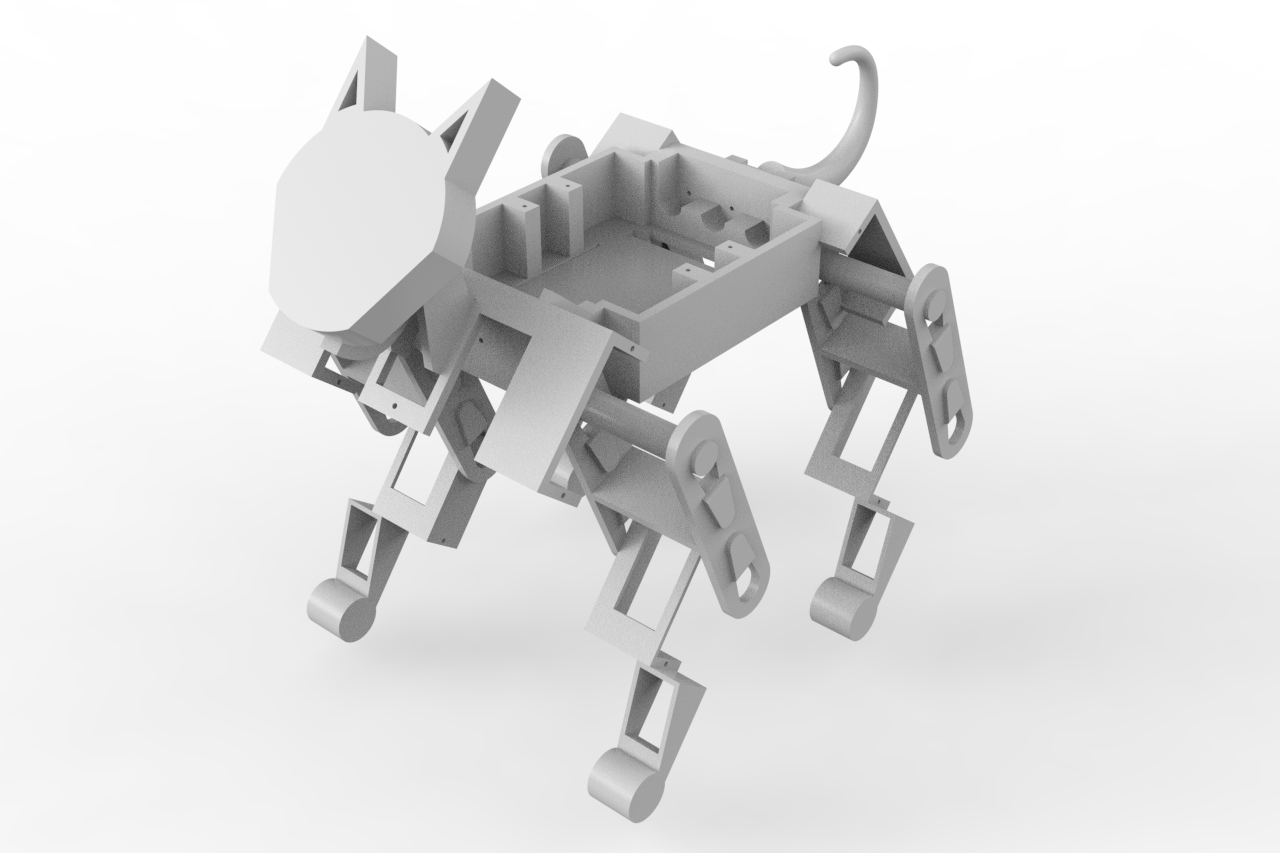
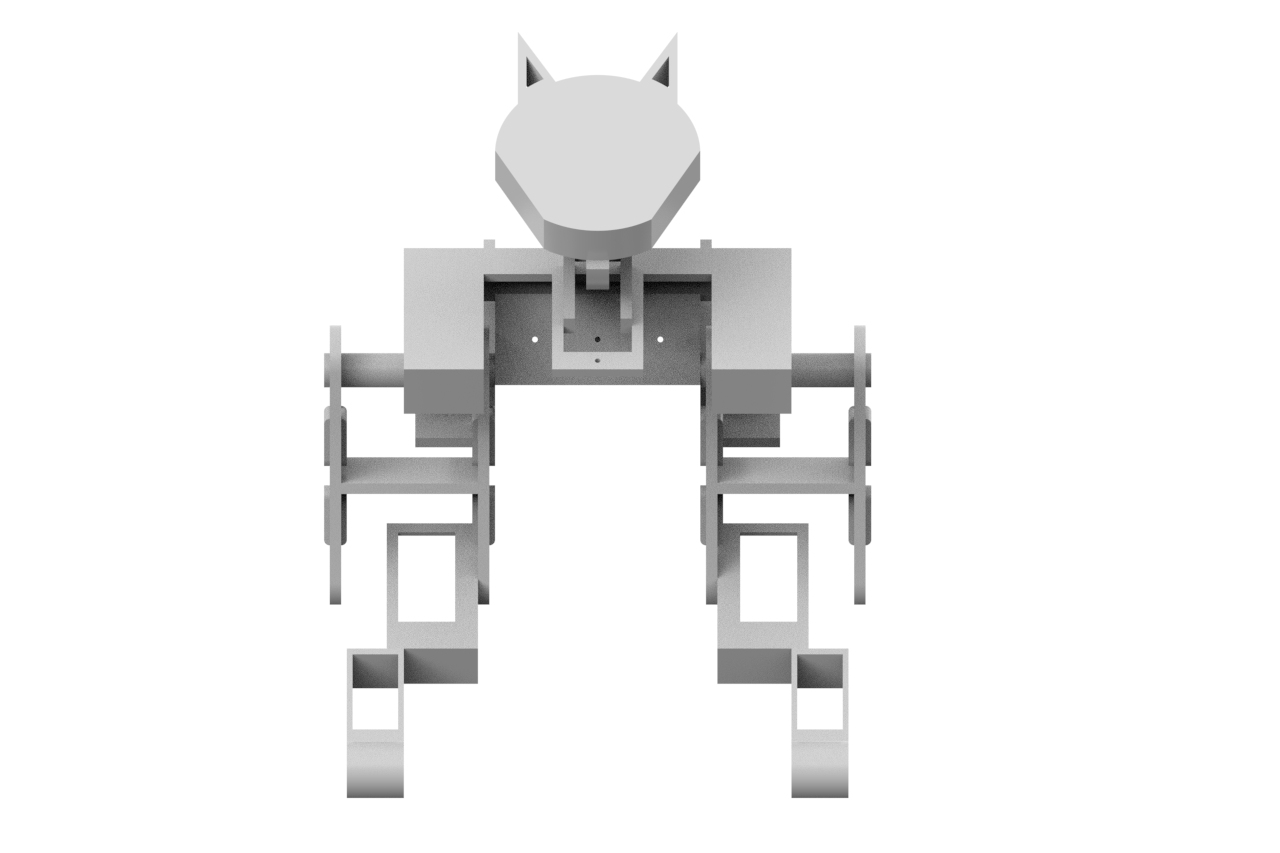
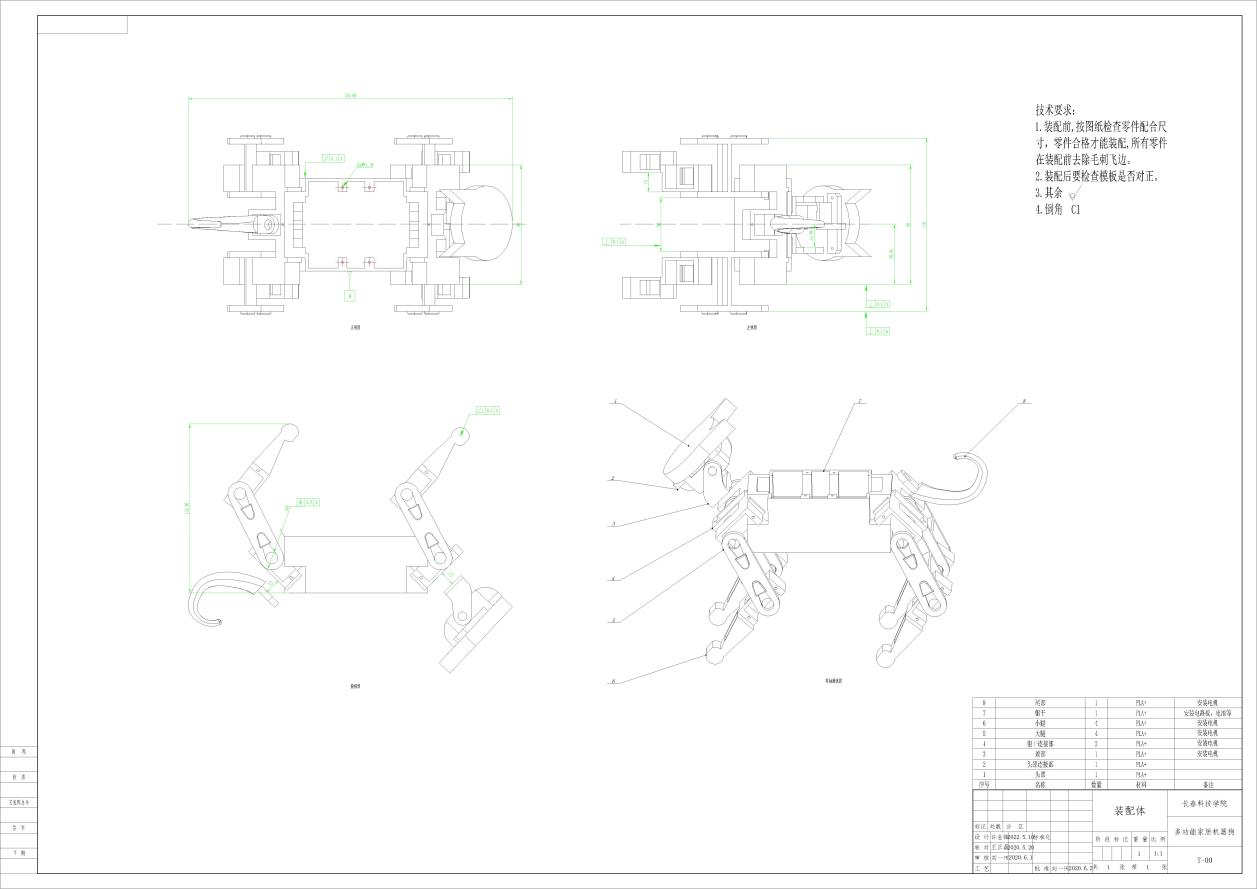
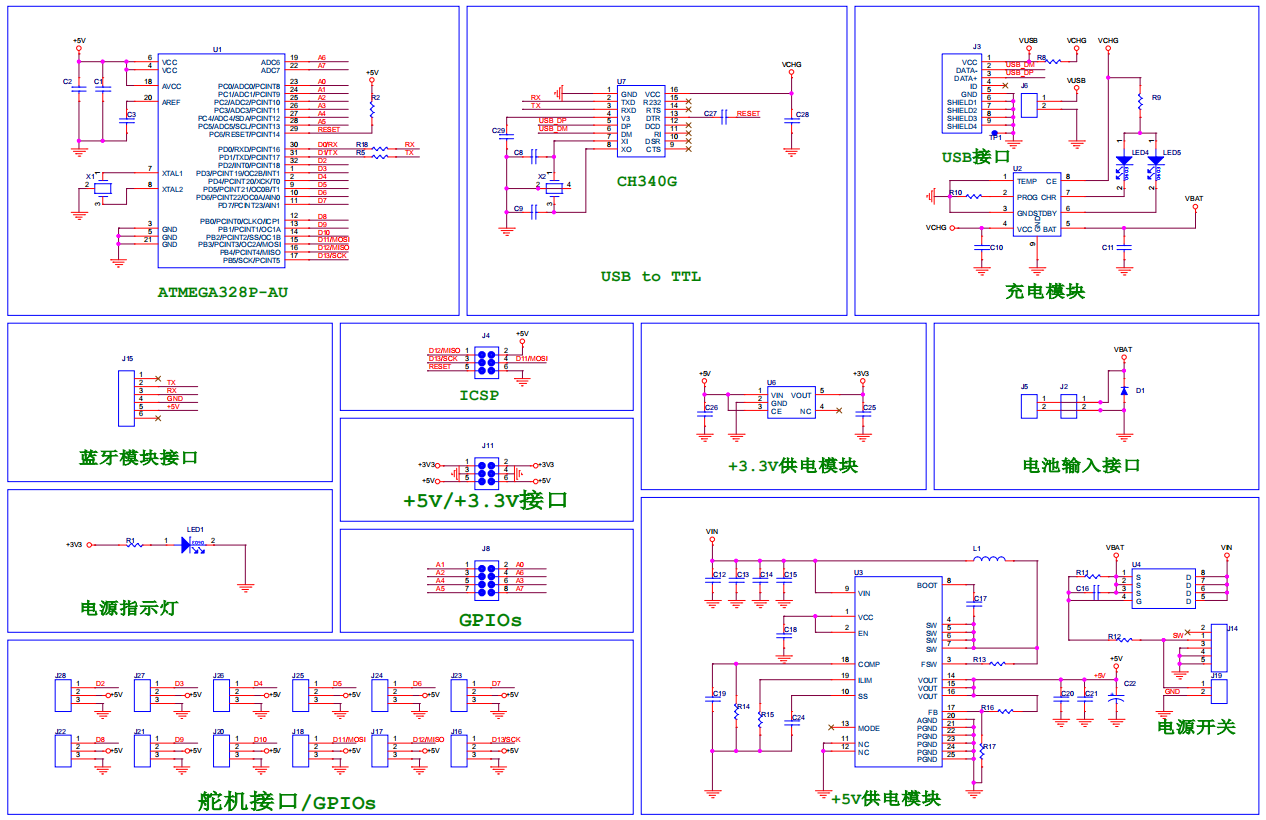
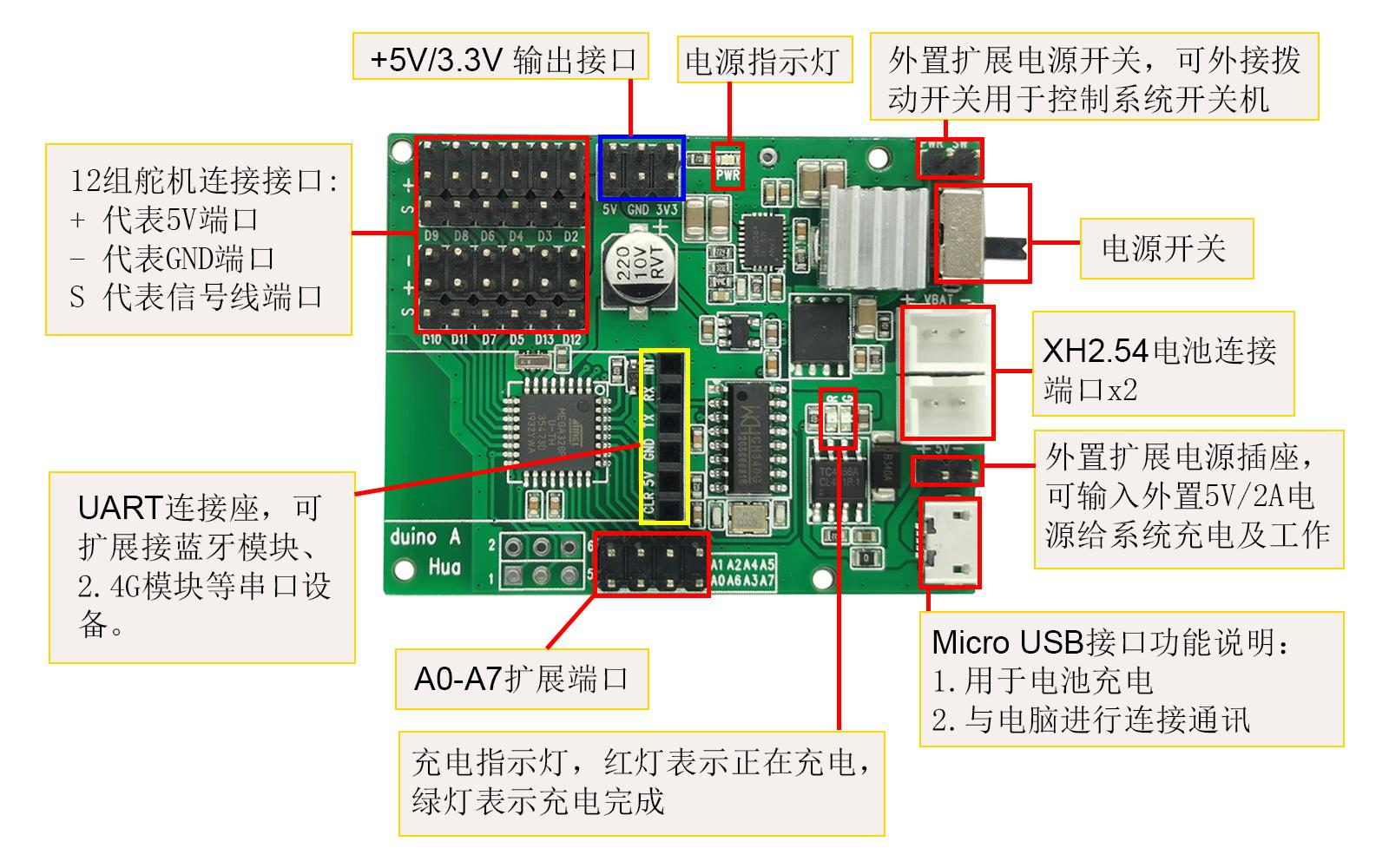
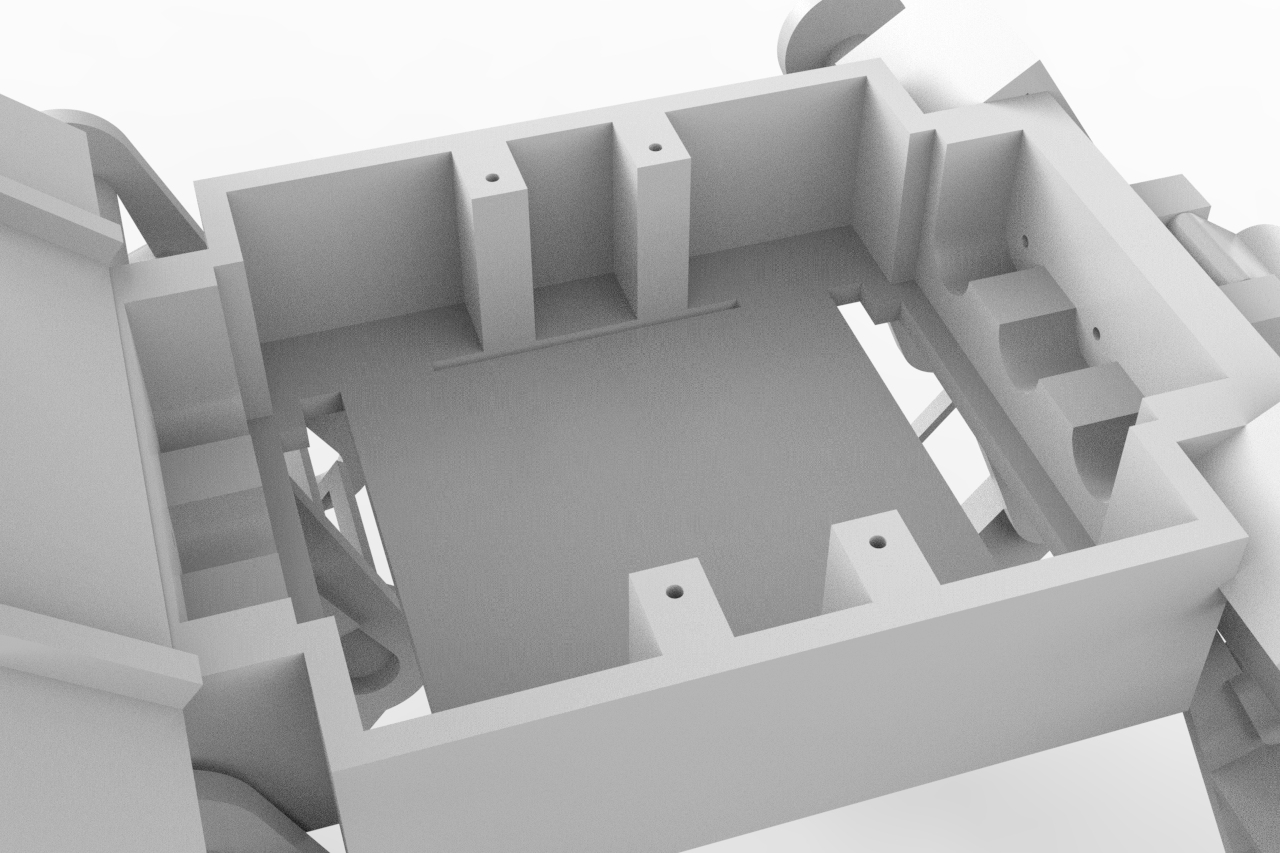
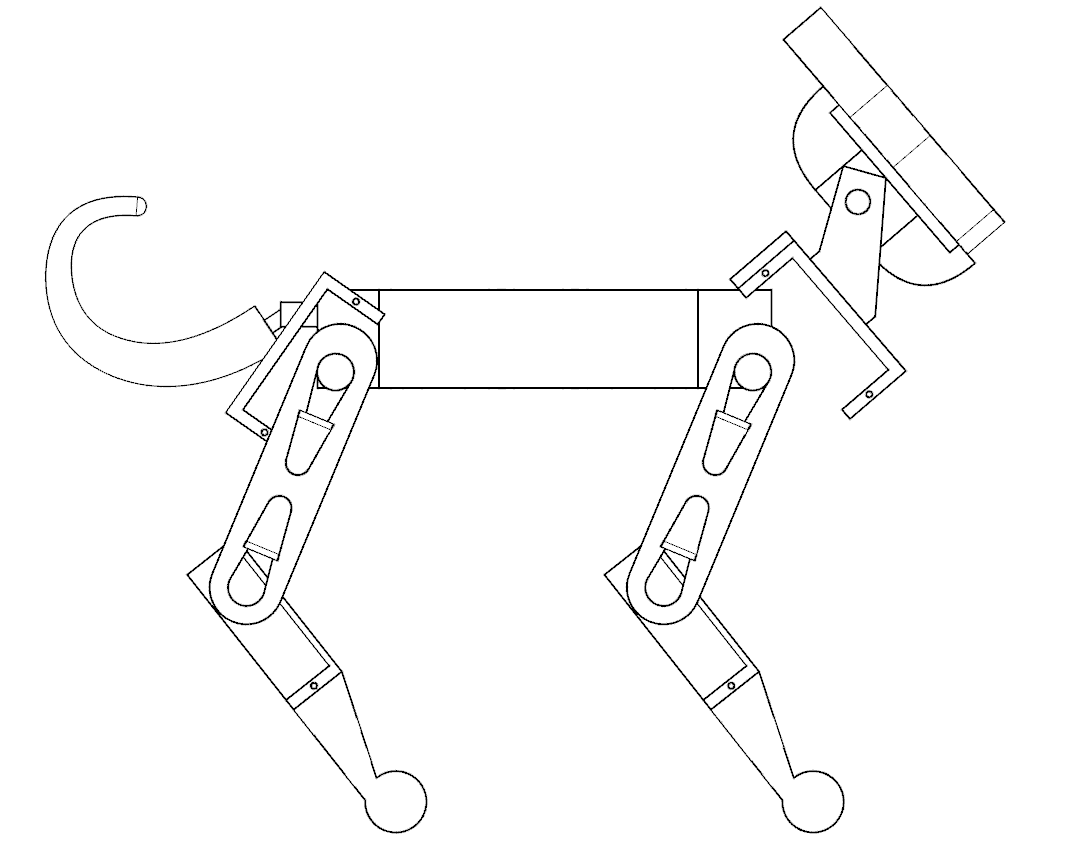
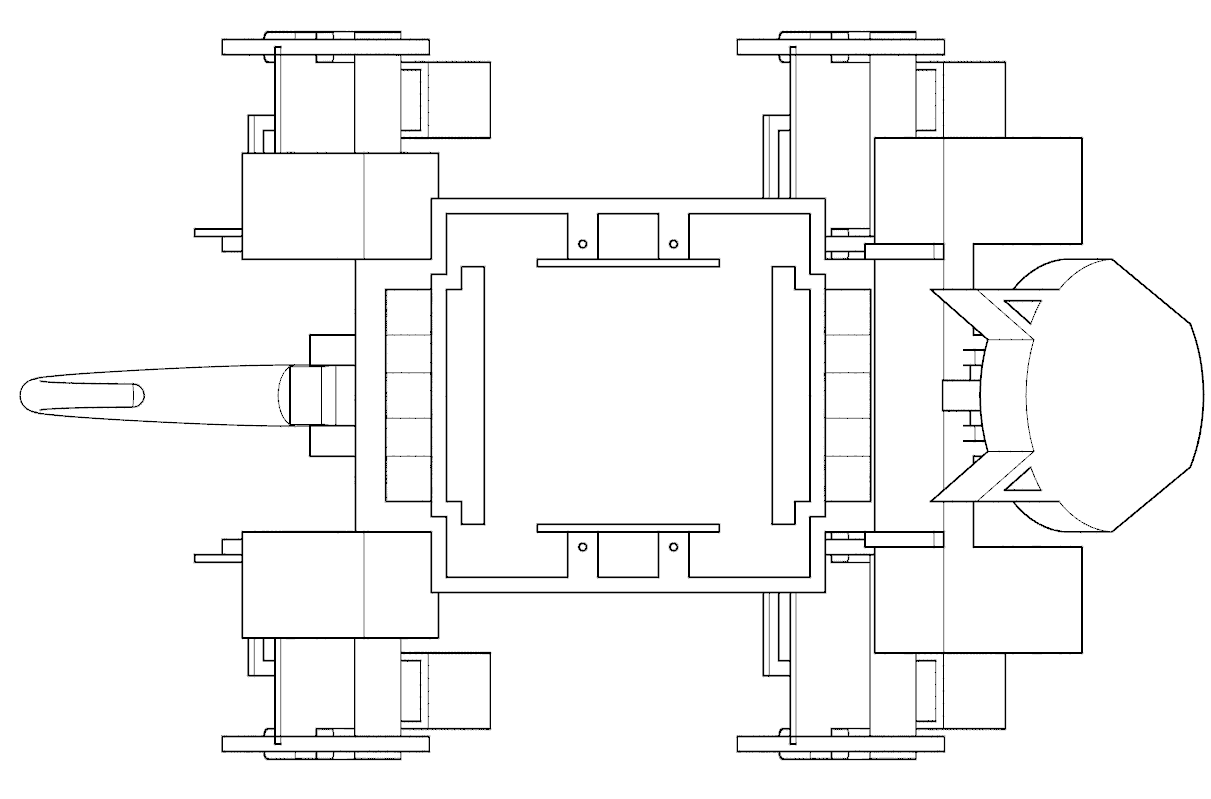
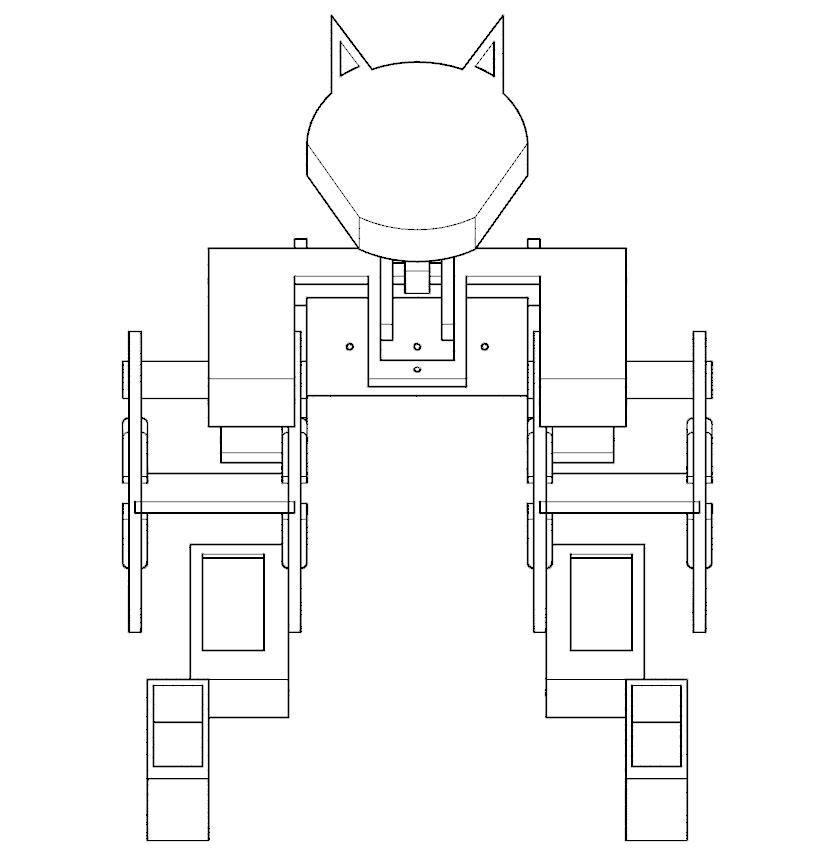
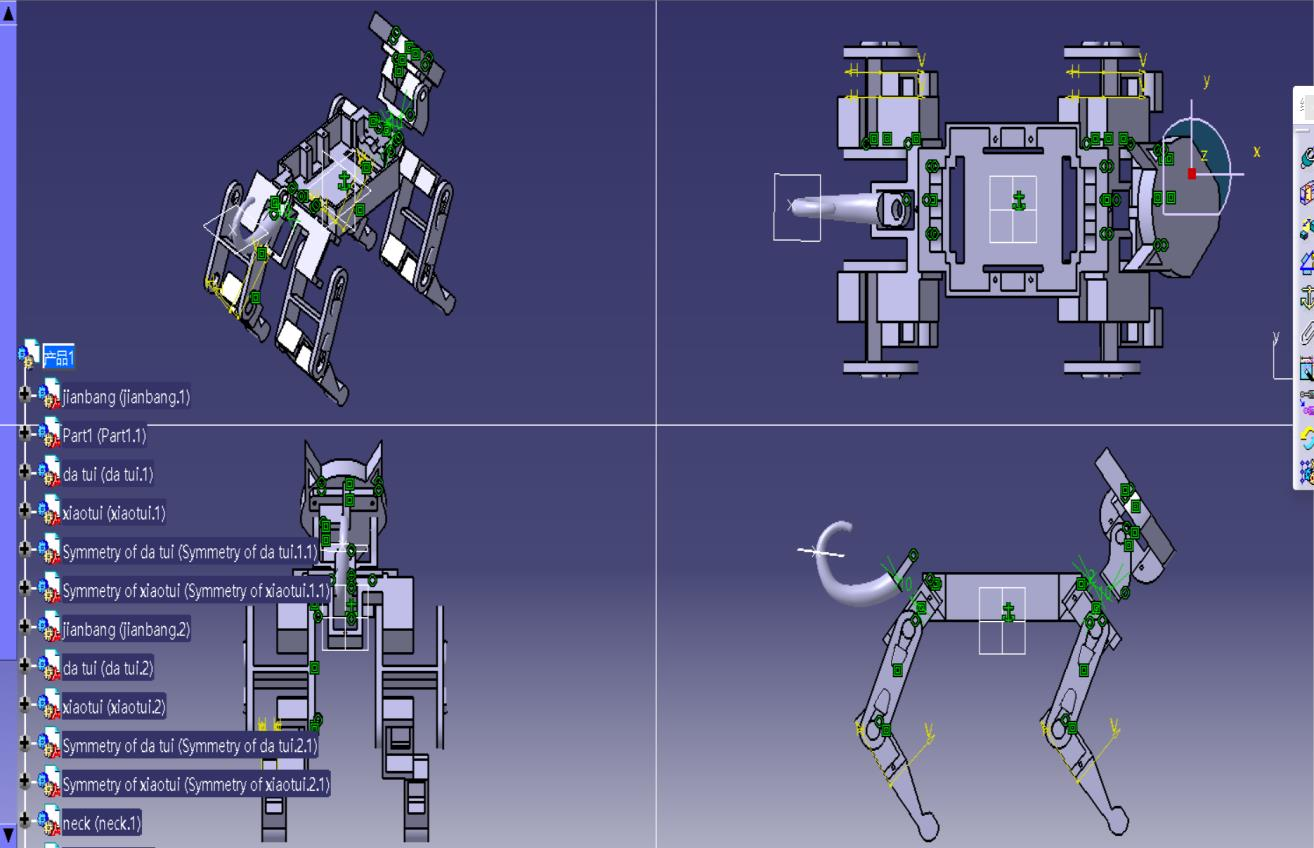
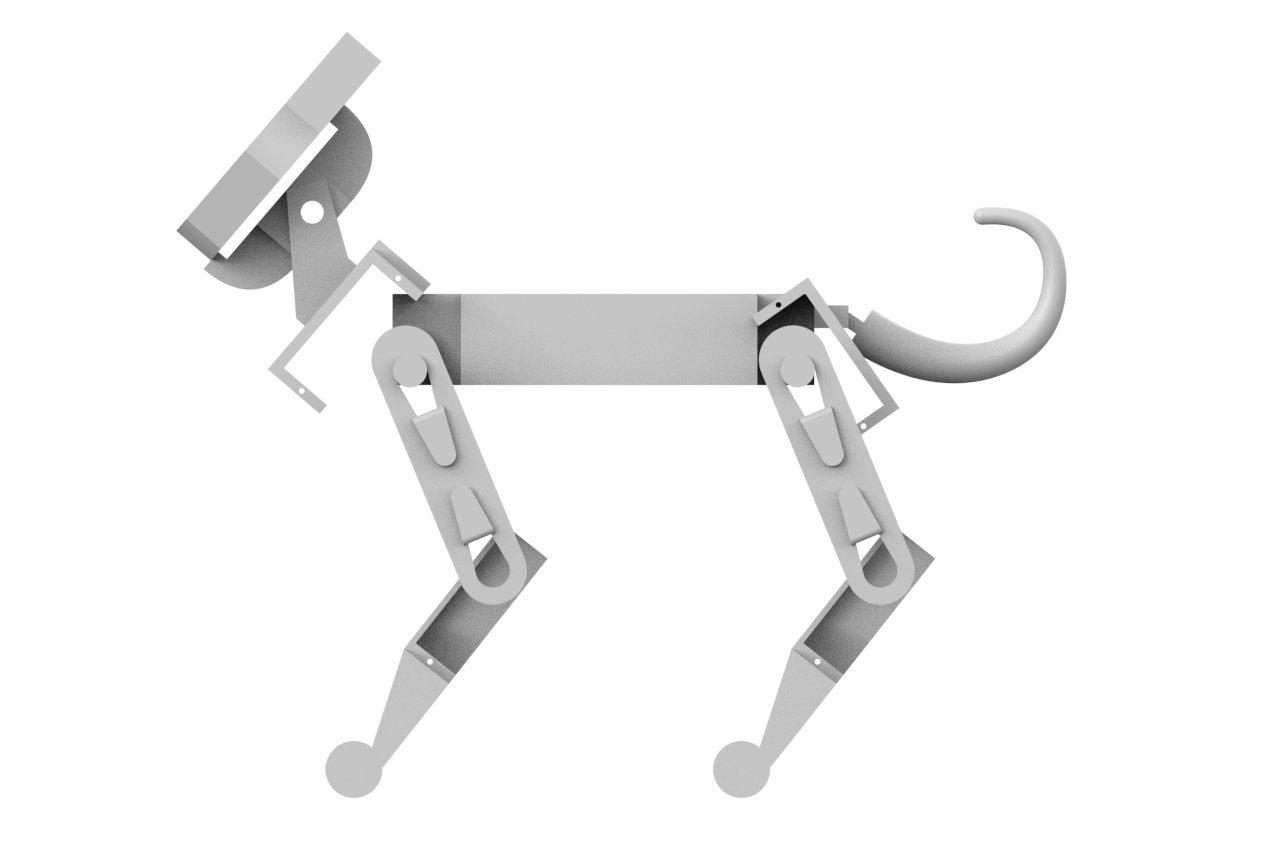
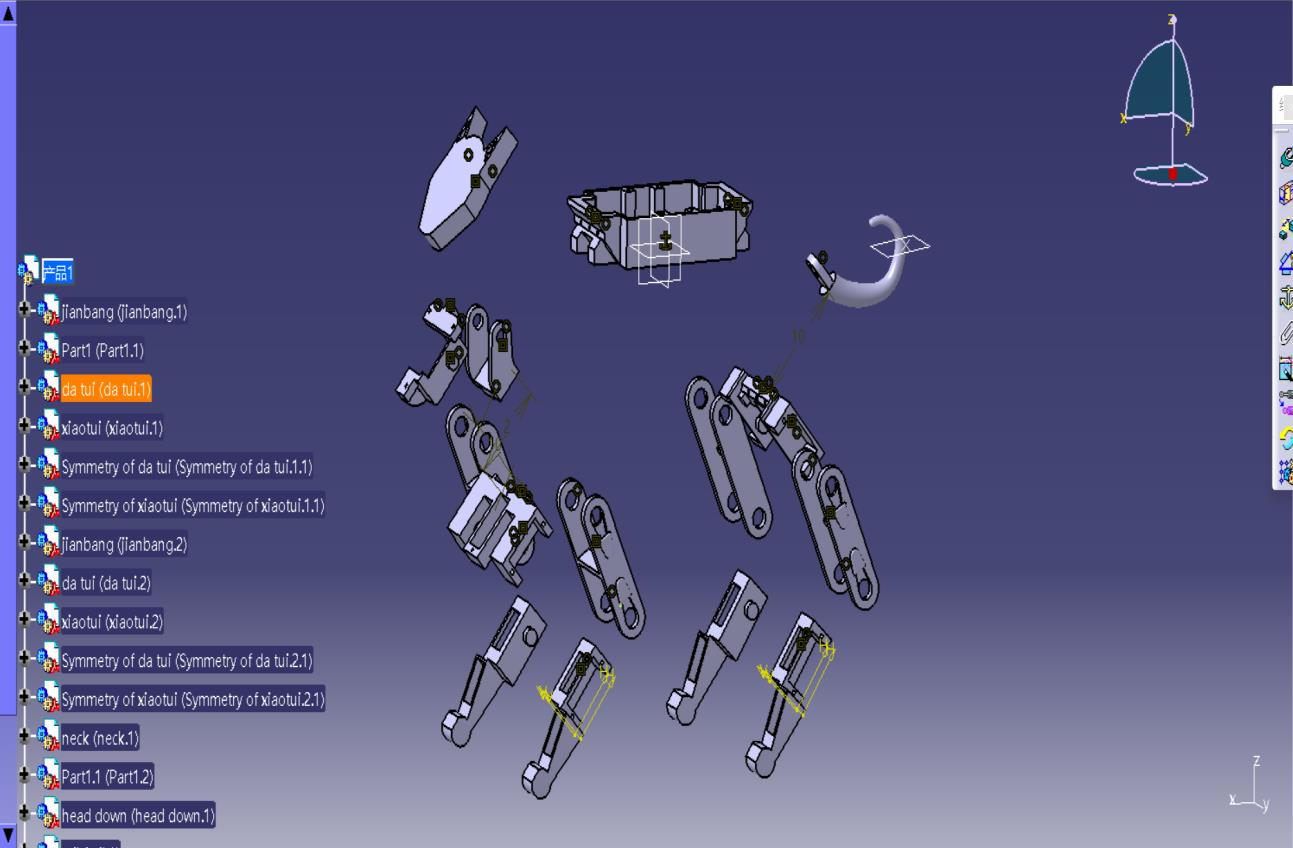
在当今科技飞速发展的时代背景下,感知视界——新一代基于机器视觉的多功能仿生机器人中国方案缔造者项目应运而生。随着机器视觉技术的不断进步以及仿生学研究的日益深入,该项目致力于打造具有卓越感知能力的多功能仿生机器人。一方面,机器视觉技术的提升使得机器人能够像人类一样准确地感知和理解周围环境,实现精准导航、高效避障和精确的物体识别。另一方面,从自然界生物中汲取灵感的仿生设计,赋予了机器人出色的运动能力和适应能力。 在社会需求的驱动下,面对劳动力短缺和自动化需求的增长,以及复杂环境下作业的挑战,这种基于机器视觉的多功能仿生机器人将成为解决诸多难题的有力工具,为中国乃至全球的科技发展和社会进步贡献独特的智慧与力量。在机械结构方面采取十个自由度的机械连杆结构的设计,让机器狗实现摇头摆尾、行走、下蹲等动作。通过对机器狗的受力分析,计算了狗腿部的扭矩,机器狗的功率,我们选择了MG90S舵机作为驱动装置,绘制了机器狗的平面设计图;再利用CATIA对机器狗整体结构进行3D建模,用PLA+材质对其进行3D打印。 在控制方面采用arduino作为控制主板,程序设计简单让机器狗的行走更加稳定迅捷,并配备openmv智能识别模块,实现自动避让功能,以及k210模块实现口罩检测功能,机体配有蜂鸣器、陀螺仪、无线串口通讯等电子模块,可实现远程控制、自动警报、播放音乐跳舞等功能。大容量锂电池也可以支持机器狗的长时间续航工作。内置AI语音模块,WIFI模块自动连接网络,可以更好地和人们进行交流,实现人们亲子活动。SOS自动报警系统,可以更好的保卫家园。载物行走功能,帮助人们在购物时解放双手,还可以帮助人们取快递,充当电子导盲犬,帮助残障人士。



