作品名称基于线性CCD的智能小车摄像头循迹系统设计
作品分类其他
参赛院校广州城市理工学院
指导老师周超
团队成员卢佳欣
奖项等级一等奖
竞赛年份2021
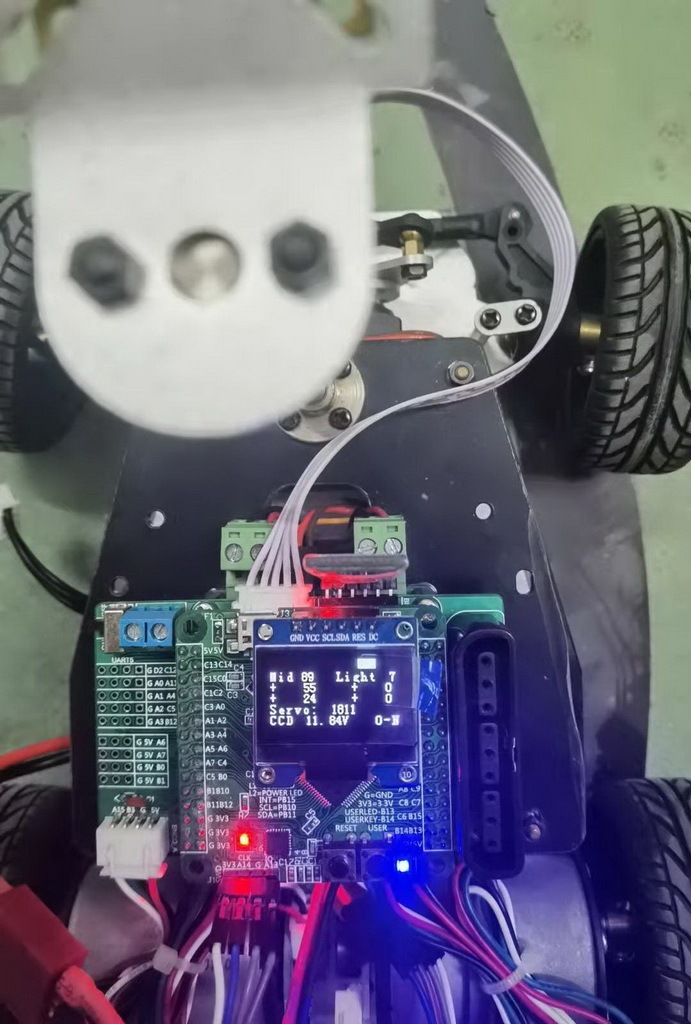
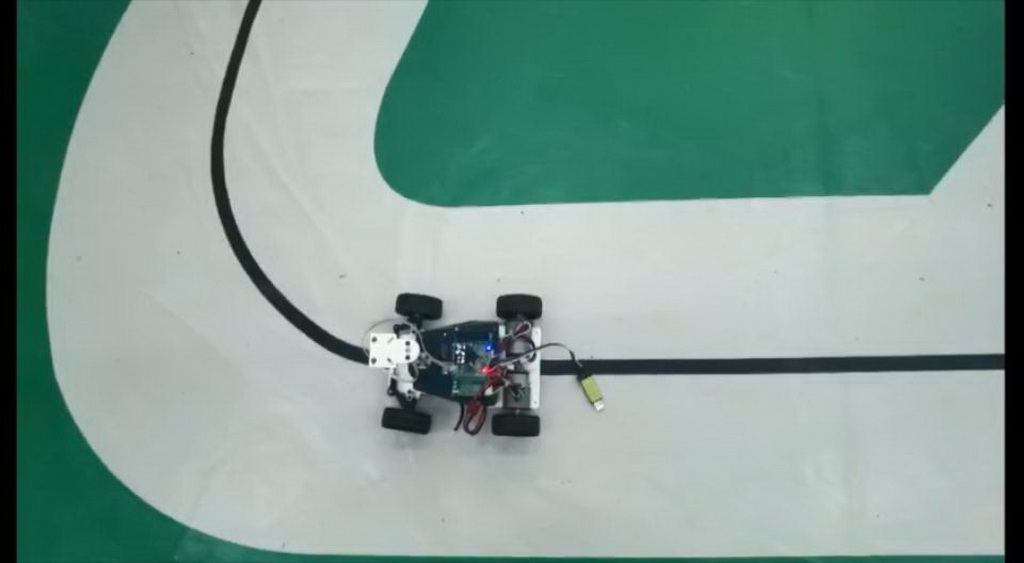
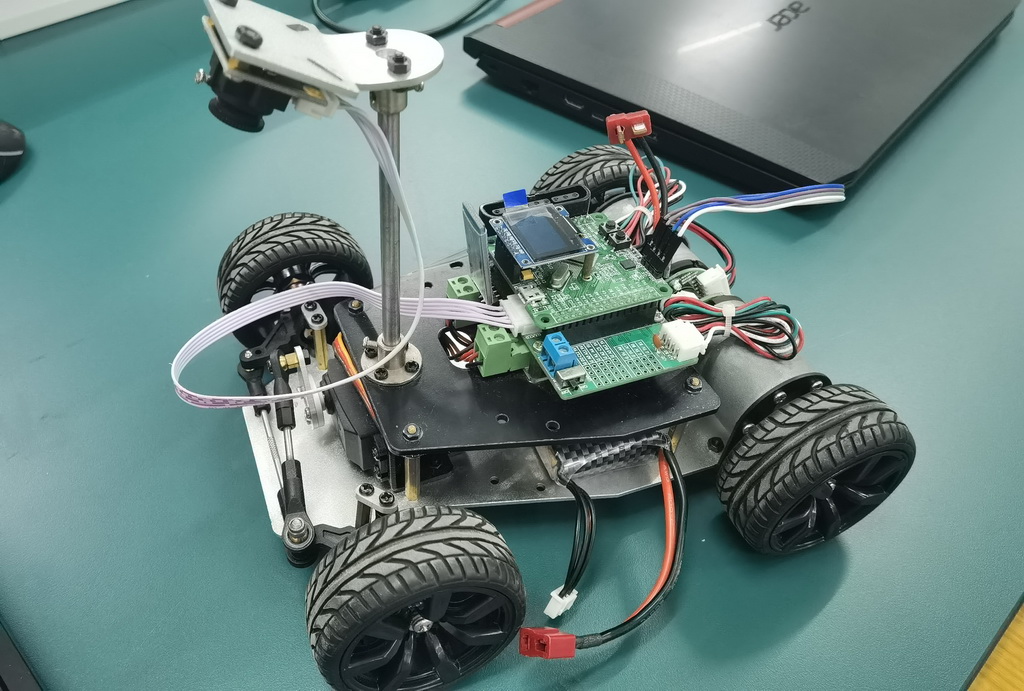
针对目前一些智能小车在循迹过程中不能快速调整方向、通过弯道及直角转弯时容易跑偏的问题,提出该基于线性CCD的智能小车摄像头循迹系统并对此进行研究。该系统基于STM32F103单片机,利用线性CCD的工作特点,选择TSL1401线性CCD作为传感器采集赛道信息,由单片机通过PID算法控制舵机的转角和电机的转速,经过系统硬件电路搭建和软件程序编写,使小车能够自主识别黑色引导线并根据黑线走向实现快速稳定的寻线行驶。通过实地实验,该循迹小车不仅能在直赛道上及时调整方向,而且能准确平稳地通过“8”字赛道,转弯角度为90°的弯道。循迹上线性CCD传感器相比传统光电传感器,具有更高的前瞻性,可以更早地感知路径变化,提前矫正前进的方向。使用DMA直接存取技术可减少CPU处理任务的数量,可将数据直接传输给存储器,使系统的采样效率提升,并且传输的数据量越大,效率提升越明显,可确保小车能平稳准确地转过更大的弯道;利用动态阈值算法找出中间值,更便于数据的二值化处理;PID位置控制算法使偏离矫正有了依据,能使系统快速响应且不超调。该系统设计提高了小车的灵敏度和机动性,基本达到设计要求,对类似的智能小车设计与实践具有参考意义。



