



作品名称基于AI视觉模型和动态规划算法的智能垃圾处理系统
参赛院校 河北农业大学/中国矿业大学/南京林业大学/江苏师范大学科文学院/河南师范大学
团队成员马垠叠、谭一凡、胡健凯、叶钰斌、赵婉夷
奖项等级二等奖
竞赛年份2022
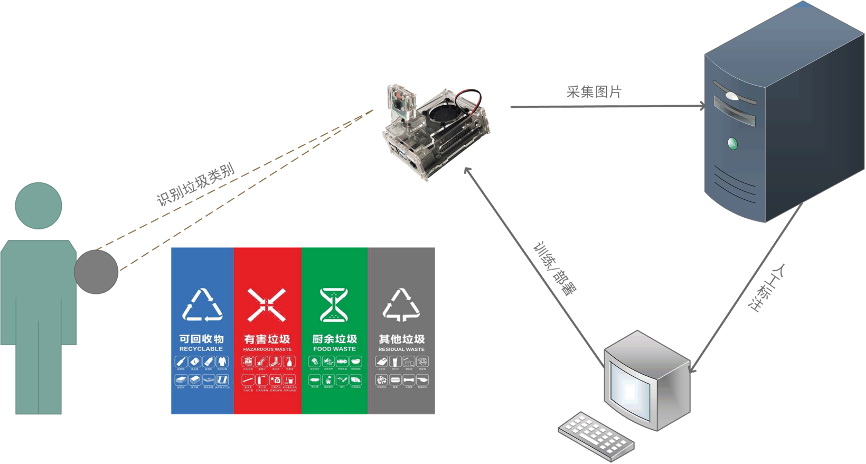
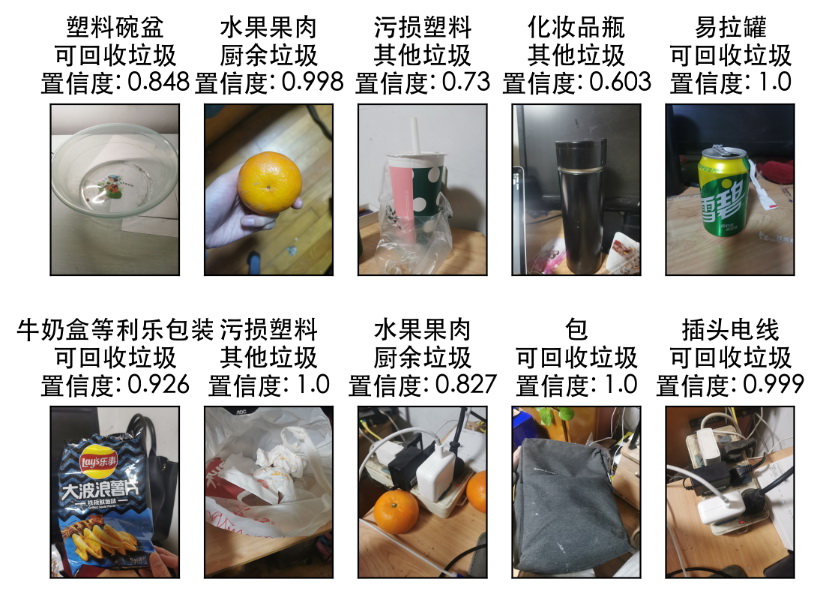
“基于AI视觉模型和动态规划算法的智能垃圾全流程处理平台”利用人工智能、大数据、IoT等成熟的智能技术,在整个垃圾分类链条中创造出新产品、新服务。该系统包括了集网页管理端、垃圾清运人员小程序端的智慧环卫运输管理系统和部署了智能视觉模型Swin Transformer的嵌入式设备,实现了对垃圾清运全过程的智能统筹和监管,并采用动态规划算法,大大提升了垃圾清运的执行效率。目前该系统已获得软著1项,申请国家发明专利1项。系统的主要亮点如下:(1) 任务高度流程化,管理员可直接在网页端查看任务进度并获取相关信息,同时将 任务拆分成多个节点动态分配,大大提高工作效率和工作灵活性;(2) 引入默认任务概念,每日定时刷新,充分提升管理效率;(3) 实时查看任务地点位置,在确保任务顺利进行的情况下,充分提升协同能力;(4) 调研学术界主流深度学习视觉模型,在充分研究的基础上适当改进,垃圾分类识别准确率可达90%,实现垃圾分类的精准化;(5) 模型部署至树莓派 IoT 设备,实现动态影像智能采集,丰富训练库,不断提升模 型识别精度;(6) 使用动态规划算法实时高效计算多任务地点最优路径,省去绕路时间,大幅提升 任务执行效率。



