
作品名称智慧工厂机器人巡检系统——基于YOLO V3智能图像识别移动式巡检系统
作品分类其他
参赛院校湘潭大学
指导老师王求真
团队成员张海 、罗鑫 、龙思 、田海玲 、陈圣琪
奖项等级一等奖
竞赛年份2020
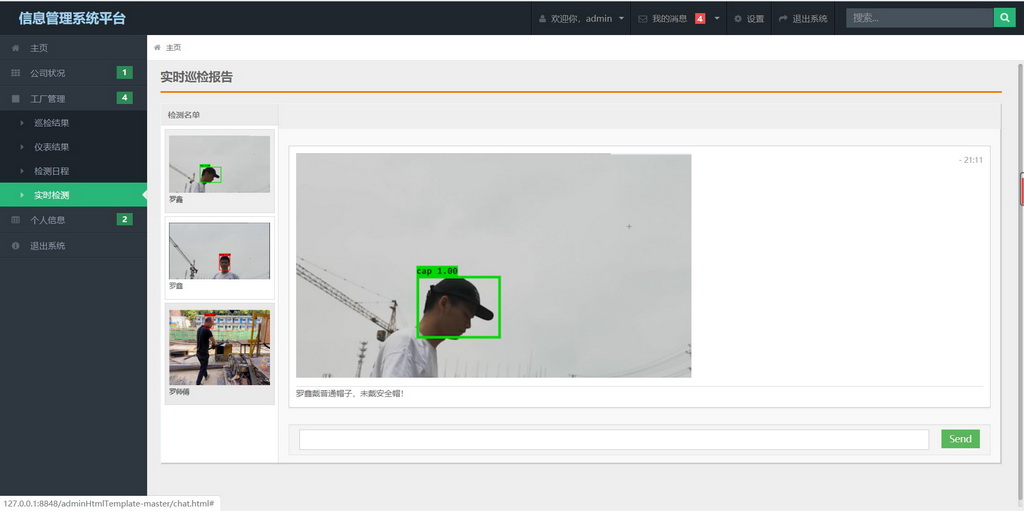
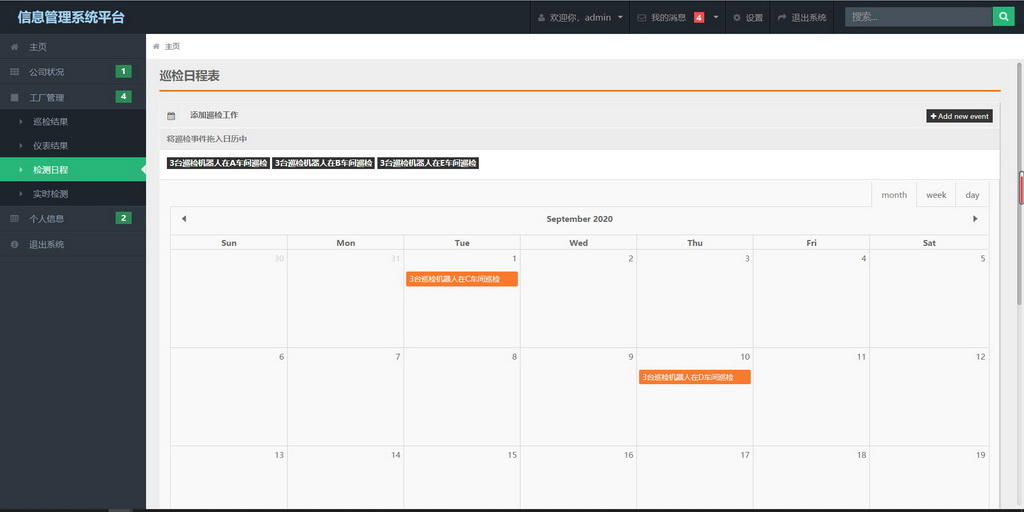
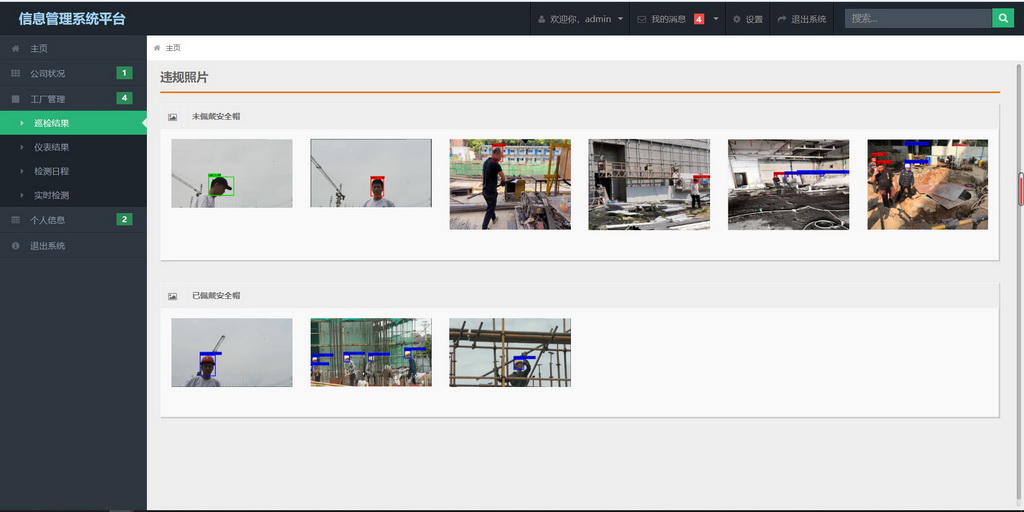
本作品以基于ROS的turtlebot3机器人为载体,实现工厂的巡检管理,包括基于YOLO V3的安全帽识别、工人跌倒行为识别(立即发出警报)以及仪器仪表数码识别,将识别结果上传于信息管理网站,实现对工人工作规范进行评比,对仪器仪表数码进行统计。
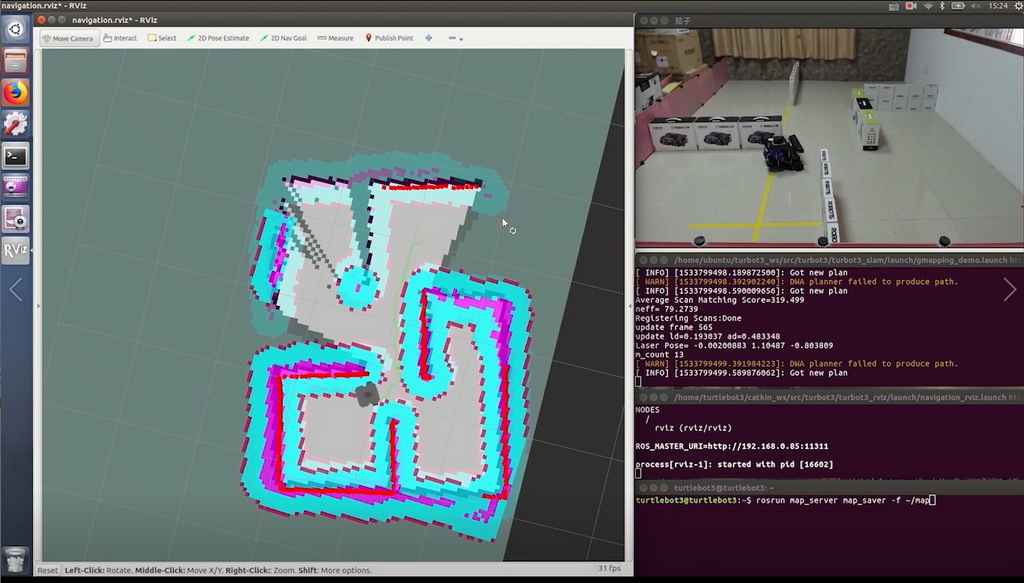
本作品是通过研究机器人路线规划、自主导航、视觉检测等技术来开发一款智能工厂巡检机器人,具体功能有:
(1)实现turtlebot3机器人自主导航;
(2)实现turtlebot3机器人安全帽识别;
(3)实现turtlebot3机器人进行跌倒行为识别;
(4)实现turtlebot3机器人进行仪器数码识别与读取;
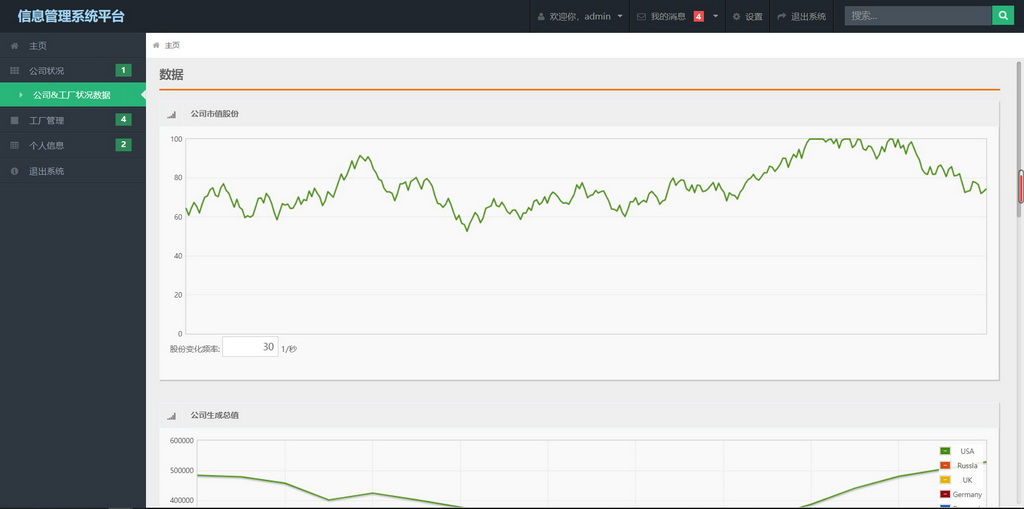
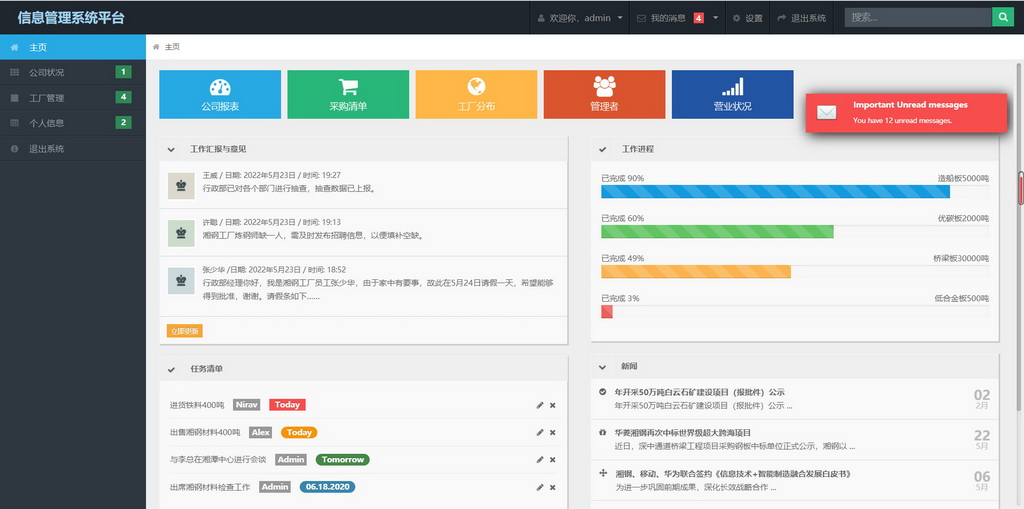
(5)设计信息管理网站,实现巡检工作的人机交互。



