

作品名称椒香采韵——基于YOLO模型的花椒采摘机器人
作品分类乡村振兴
参赛院校山东理工大学
指导老师鲁力群、崔建强
团队成员刘展、姜承志、李瑞
奖项等级国赛一等奖
竞赛年份2024
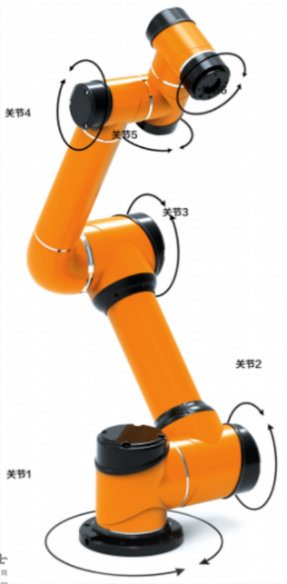
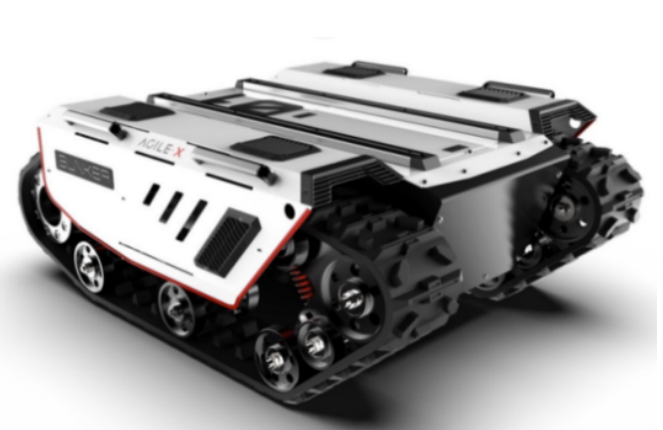
我们团队根据山东省淄博市博山区石马镇淄井村花椒种植采摘的实际需求,研制了一款基于深度学习的可以专门用于山地花椒从青熟花椒到红熟花椒不同生长阶段的花椒采摘机器人。本花椒采摘机器人主要由识别与定位系统、末端执行机构、行走系统及机械臂四大部分组成。根据花椒种植地小地块且花椒树种植位置不规则的特性,首先利用无人机获取整片花椒地正射影像,将花椒树的位置进行标注,方便花椒采摘机器人进行路径规划到达花椒树采摘位置;行走系统采用履带式底盘,提高对山地复杂地形的适应性。识别与定位系统是本花椒采摘机器人的研究重点,分别建立花椒树枝干、叶片和果实的样本集,并且基于最新的YOLOv5目标检测算法,引入可变形卷积对YOLO算法进行改进,提升对生长不规则的花椒果实及遮挡状况下花椒果实的识别准确率,实现花椒采摘机器人在田间行走过程中对花椒果实实时定位识别,通过机械臂实现末端执行机构的准确定位。末端执行机构采用剪抓一体设计,其将花椒整母株剪下的同时进行抓取,后送到收集装置进行收集。 花椒采摘机器人可以精准高效地在田间对花椒进行采摘,以促进乡村产业发展,建设智慧乡村平台为宗旨,降低了农户的工作强度,提高农业生产从业者的幸福指数,实现乡村振兴,科技赋能。响应了我国农业无人化、智能化、机械化发展的号召。



