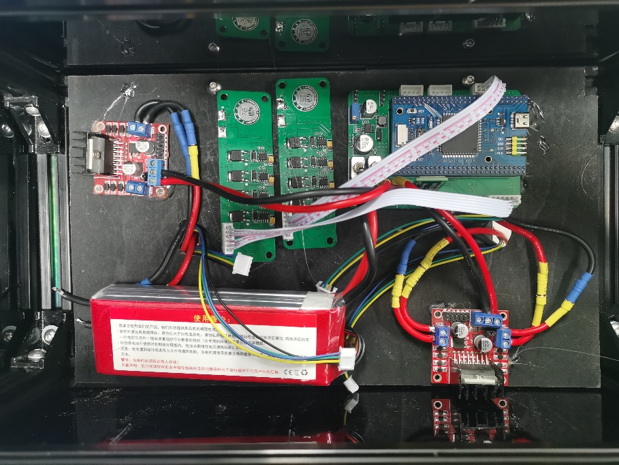
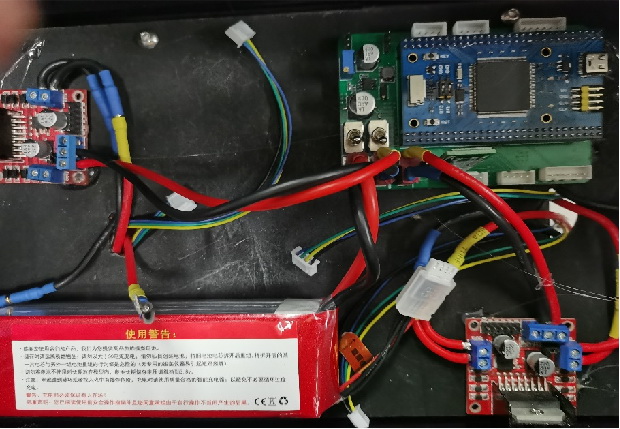
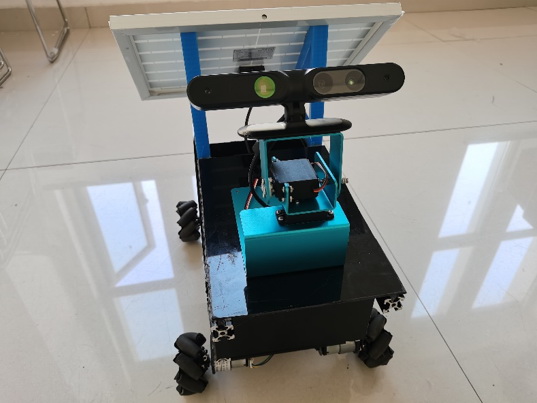
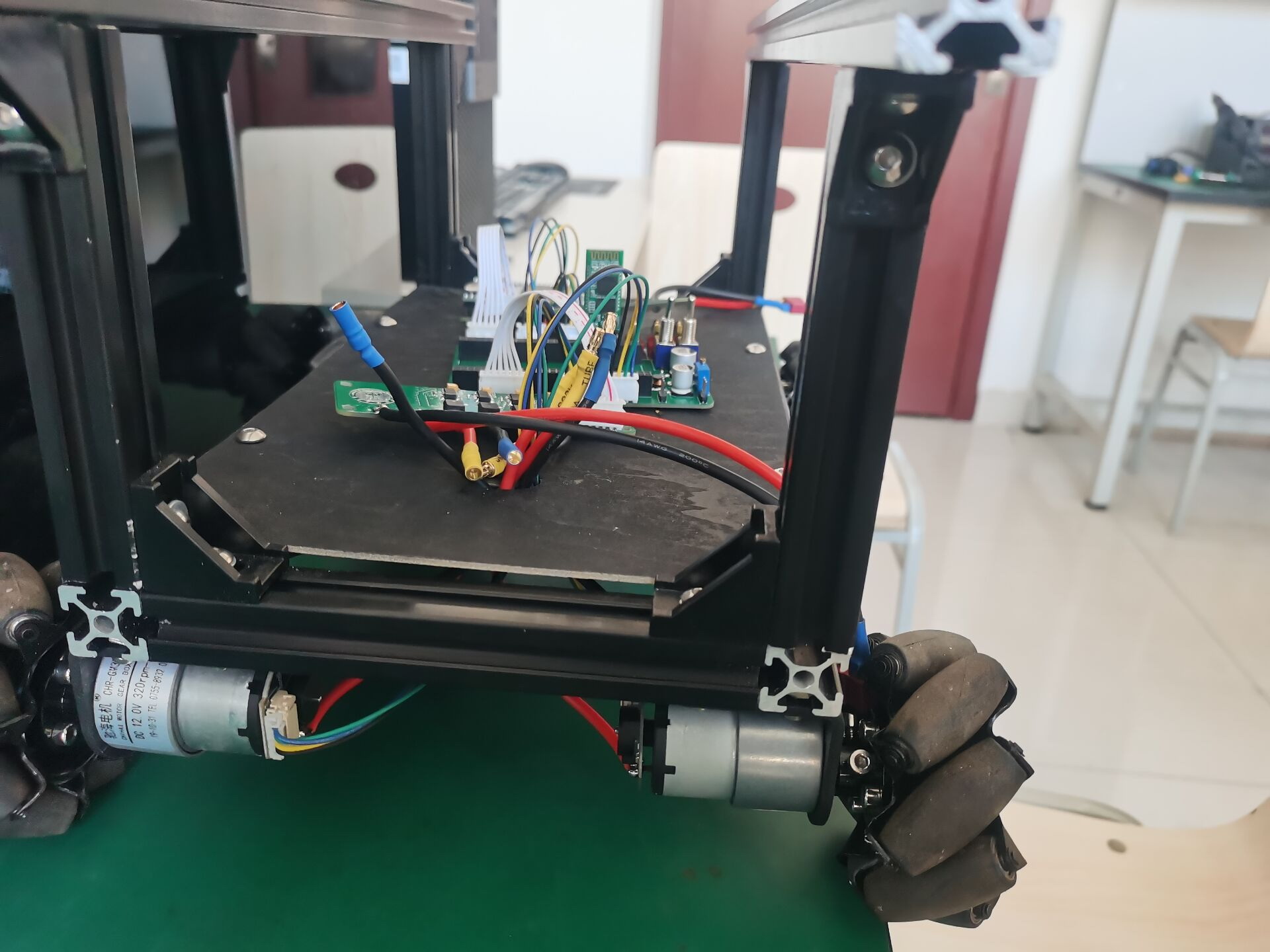
针对变电站绝缘子的检测仍然存在着准确率较低,依赖人工靠近绝缘子进行检测等问题。本团队设计出变电站绝缘子智能巡检系统,该项目主要自主循迹部分、巡检机部分、PC端算法模型识别部分构成。通过智能巡检机在变电站进行自动循迹,工业摄像头对绝缘子进行视觉识别,采集的图像通过数字图传传送到PC端,配合TensorFlow深度学习算法进行图像处理,精准识别绝缘子存在的问题,达到变电站绝缘子自动检测的目的。 智能巡检机以STM32控制器为控制核心,由车体运动部分,摄像头识别传输部分组成。车体运动部分包括4个12V电机,4个麦克纳姆轮,4个编码器,用于测量电机的实时速度,一块32单片机主控板,一个OLED屏,用于显示当前的任务以及位置,一块BTN电机驱动模块,一个12V9AH蓄电池组成。摄像头识别传输部分包括一块KS2A42工业摄像头识别模块、DJI-FPV图传模块和两个MG996舵机。摄像头安装在由两个MG996舵机搭载的云台上面,两个舵机可以通过MPU6050采集并反馈信息,进一步调整出拍摄的最佳角度。摄像头与DJI-FPV图传模块相连,巡检机在到达指定区域后进行自动拍照,采集到绝缘子图像后向DJI-FPV发送指令,DJI-FPV接收到指令后传输到PC端。 在进行网络模型训练时,利用TensorFlow框架下的深度学习库keras,提取vgg16中间结果进行迁移学习,接着将loss重新定义模型中神经网络的参数和交叉熵的损失值,在训练过程中对网络参数的数量进行了优化,共训练36000次,训练准确率达到了0.9815,测试准确率达到了0.93788。解决了由于vgg16参数庞大带来的显存占用率高、检测速度慢等缺点。 在自主循迹方面,使用UWB+RFID的自动循迹系统,智能巡检机通过UWB基站进行定位,通过RFID与磁轨迹射频识别进行导航,适应变电站强电磁干扰复杂环境,具有定位精度高、抗干扰能力强等优点。
应用于变电站绝缘子的智能巡检机器人系统

作品名称应用于变电站绝缘子的智能巡检机器人系统
作品分类智能软硬件
参赛院校北京理工大学
指导老师范应威
团队成员李晓航、高恩泽、刘帅、许连成、李珂怡
奖项等级一等奖
竞赛年份2022



