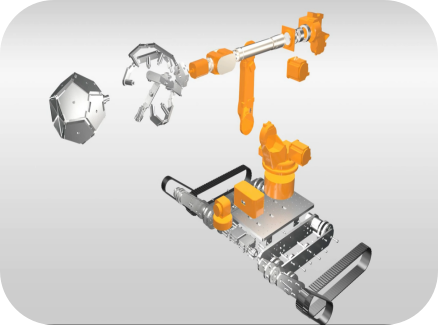




作品名称仿生欠驱动执行器的城乡多功能机器人
参赛院校山东科技大学
指导老师 栾亨宣、 翁丽媛
团队成员刘心宇、张敏、刘文杰
奖项等级三等奖
竞赛年份2022
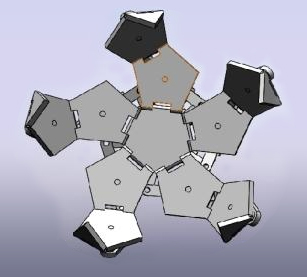
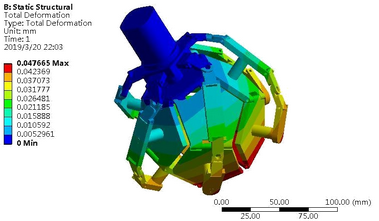
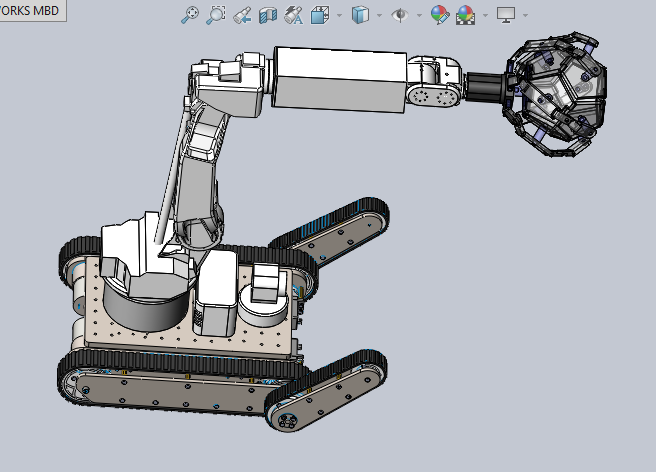
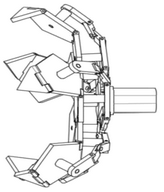
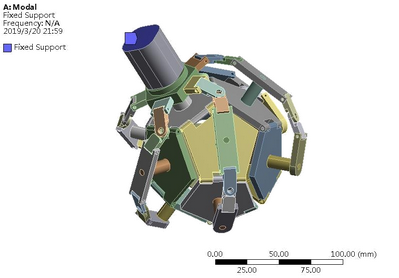
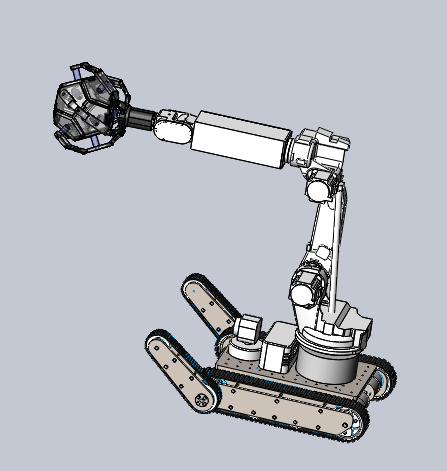
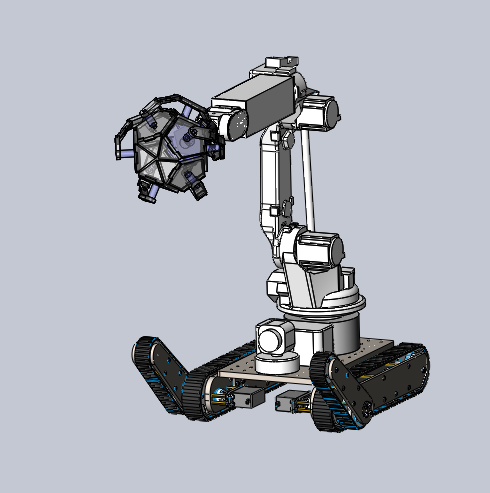
为带动乡村振兴和助力城乡服务和城乡治理,本作品结合仿生学原理,设计了一款基于仿生欠驱动执行器的城乡多功能机器人。它主要用于农业果实的采摘、疫情下无接触物资的处理和配送、城乡道路上垃圾的分类投放和森林火灾智能检测等。本产品根据自然界植被开放和闭合现象,设计了睡莲花瓣状机械爪,机械爪内壁的硅胶保护层可防止对球状果实、货物造成破坏欠驱动系统的独立控制变量个数小于系统自由度个数的,在节约能量、降低造价、减轻重量、增强系统灵活度等方面具有优势;机器人搭载北斗定位系统,北斗模块与单片机系统连接,实现精准定位;依托超声波模块、红外线寻迹模块以及摄像头实现避障、轨迹寻踪、图像捕捉等功能;通过单目机器视觉和TOF光学测距模块来对目标物体的特征进行提取,实现图像进行准确识别。在材料方面,我们使用了碳纤维复合可降解材料——金属混合结构,实现了轻量化与智能化的深度结合。在能源方面,以氢燃料电池为主,太阳能为辅,二者共同作用实现生命周期绿色化。产品响应了“碳循环,碳达峰”和乡村振兴的目标,顺应构建双碳循环新发展格局的趋势,对于乡村振兴、环境的可持续发展和城乡建设有一定的推动作用。



