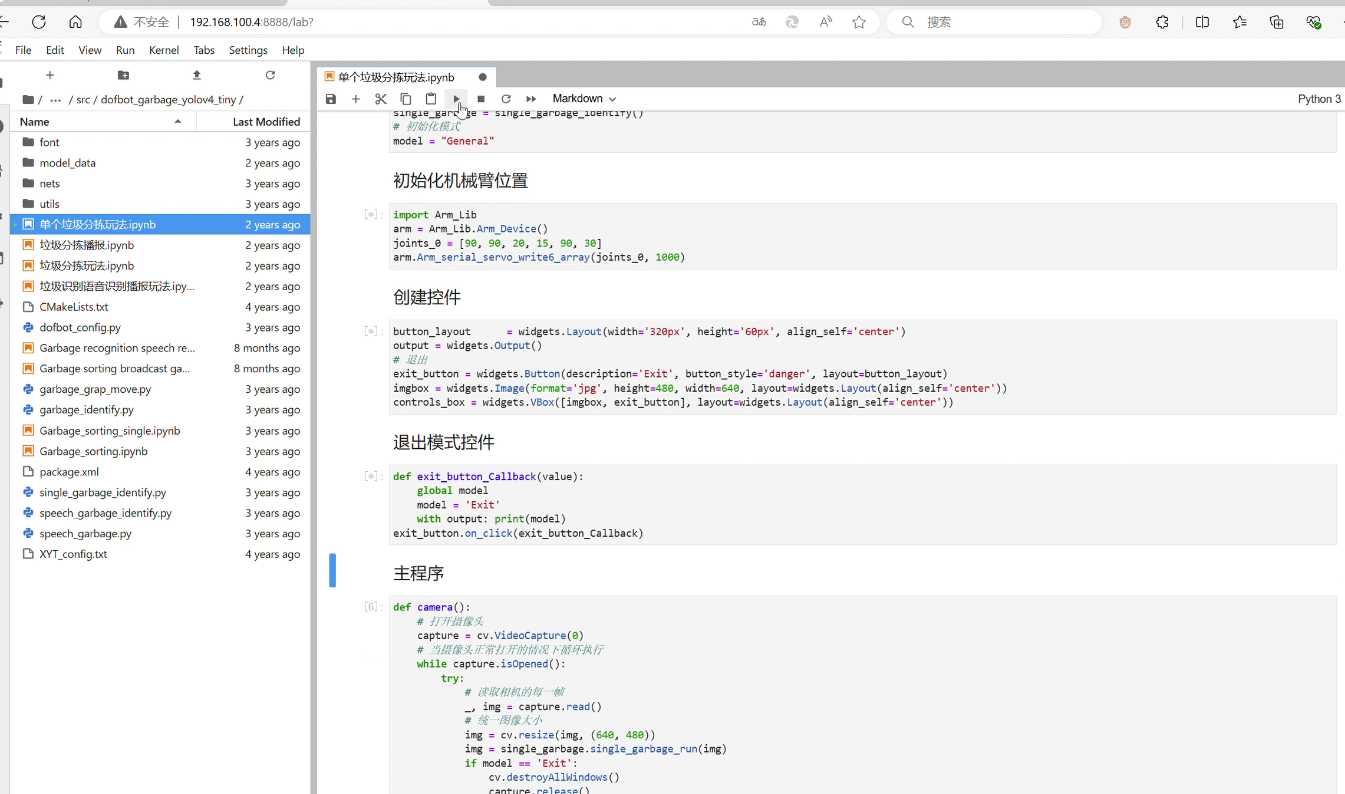
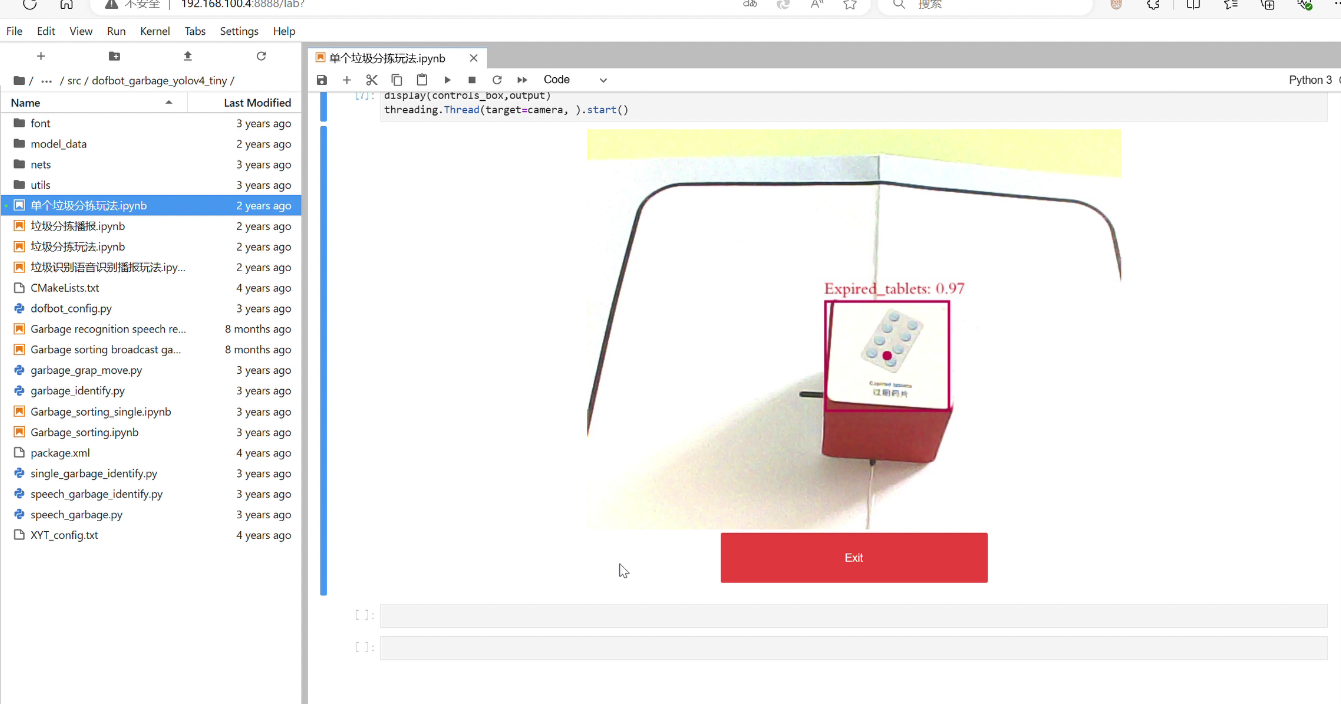
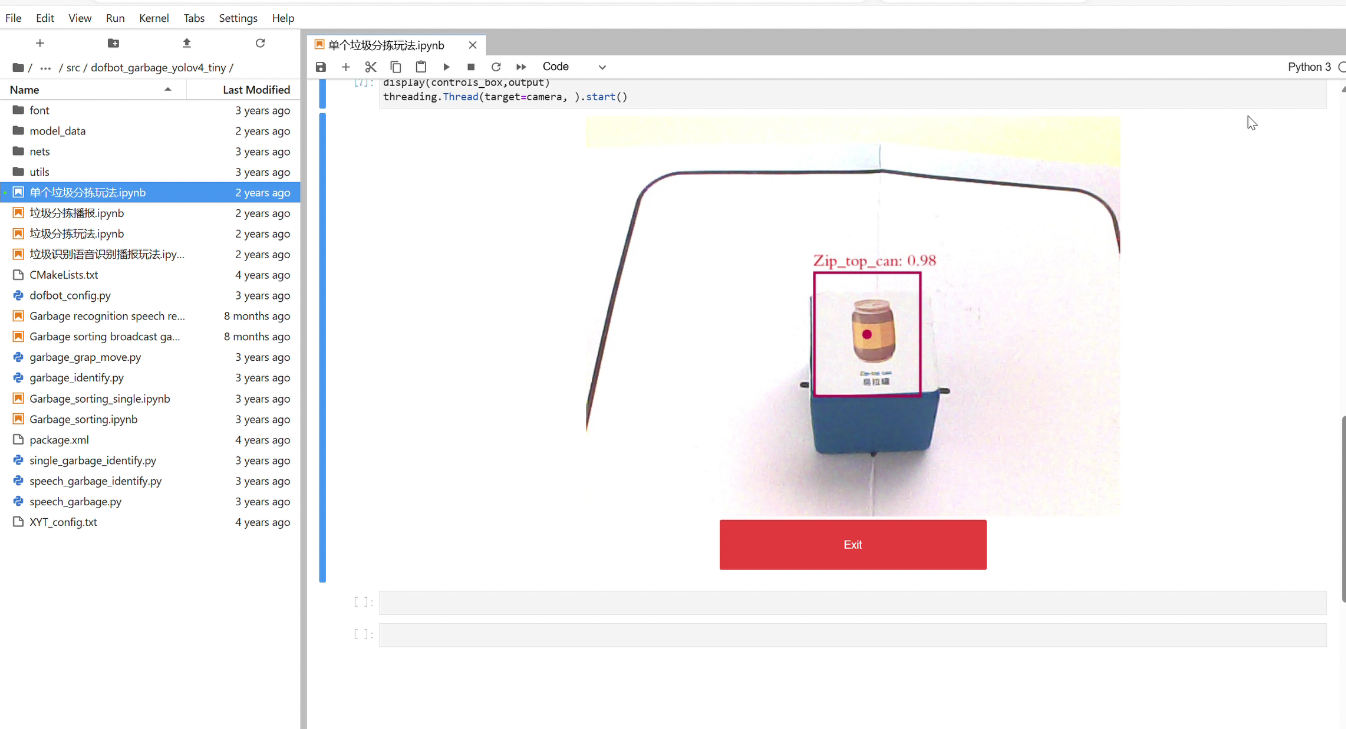
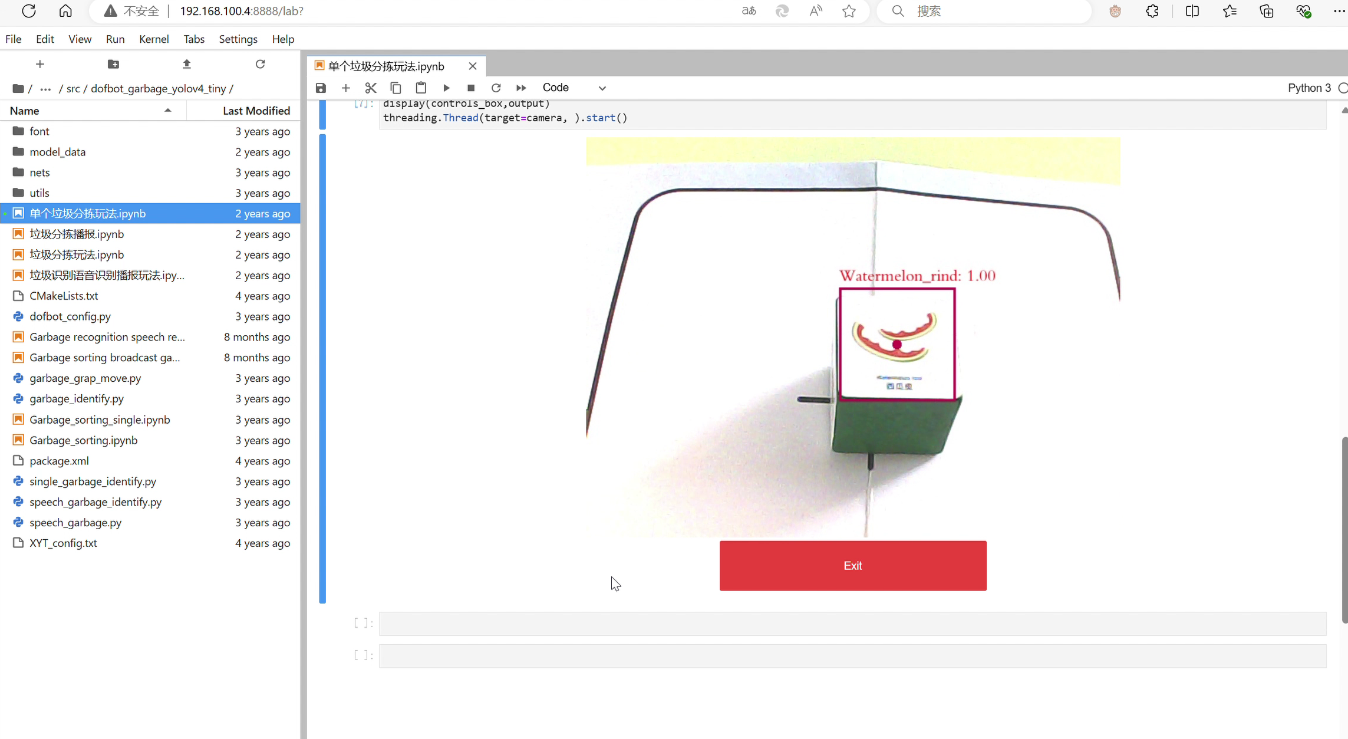
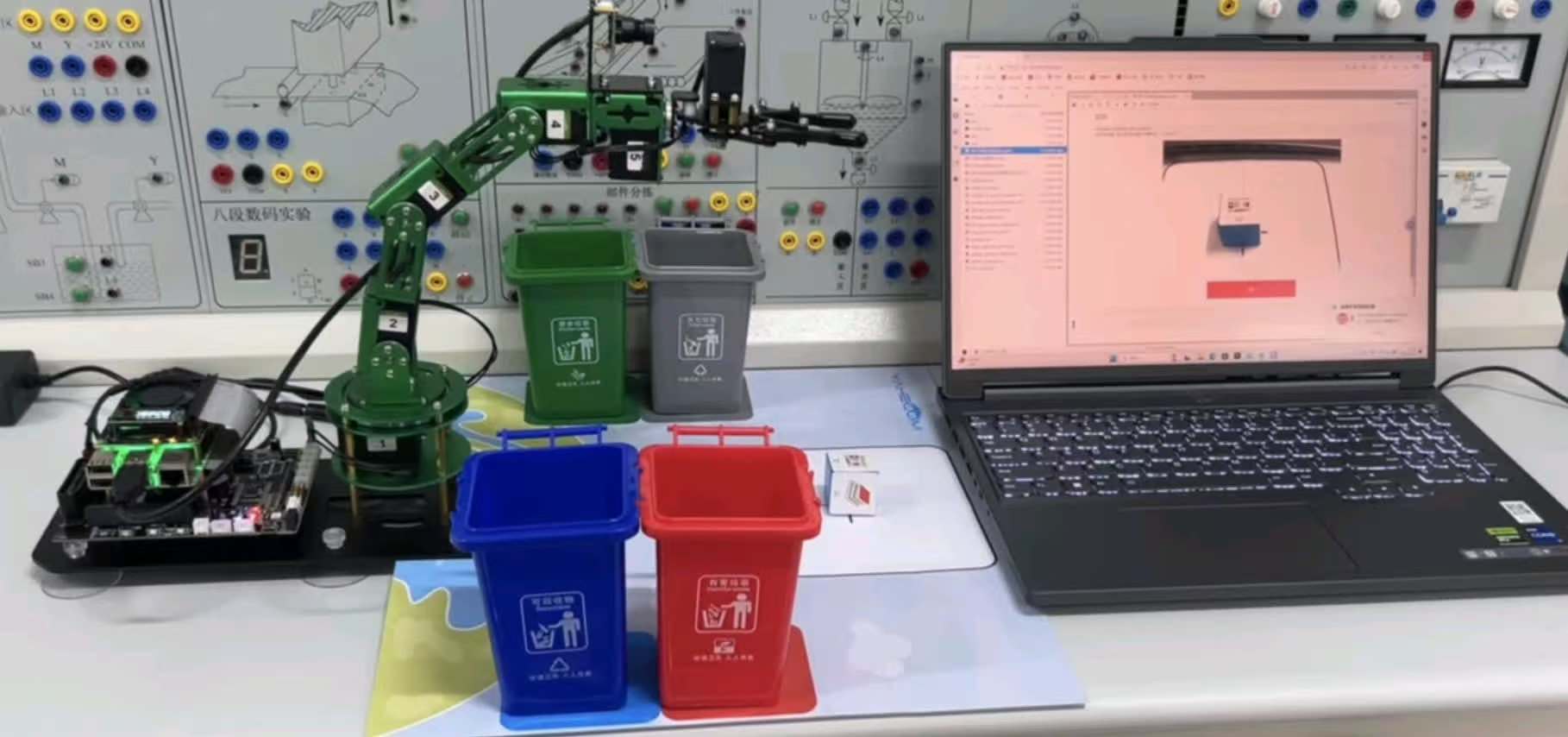
一、解决的主要问题: 1.构建垃圾分类模型:项目团队通过改进YOLOv4-tiny算法训练出模型。 2.不同类别垃圾智能检测:从图中可以观察到,智能垃圾分拣系统已经成功识别了相应的垃圾,且语音模块随之响应。 3.不同类别垃圾智能分拣:智能垃圾分拣系统识别垃圾后,控制机械臂进行精准分拣。 二、技术创新点: 1.集成化设计:将树莓派与六自由度机械臂结合,形成一个紧凑且高效的系统架构。这种集成化设计能够在不增加系统复杂性的前提下,实现多任务处理和协调。 2.高效的目标识别算法:使用轻量级的YOLOv4-tiny算法进行垃圾分类,能够在资源有限的树莓派平台上保持高效的识别性能。这种算法选择不仅提高了系统的响应速度,还在识别精度上达到了较高的标准。 3.多环境适应性:设计能够在不同光照条件下保持高识别率和分类精度。通过优化硬件配置和算法参数,系统在正常光照、强光、弱光等多种环境下均可稳定运行。 4.模块化硬件设计:系统硬件采用模块化设计,包括可更换的摄像头、拓展板和电源模块等,使得系统易于升级和维护。模块化设计也为未来的功能扩展提供了便利。 5.低成本高性能方案:利用树莓派的低成本和开源特性,结合市场上可获得的六自由度机械臂,提供了一种经济高效的解决方案,适合广泛应用于城市垃圾智能分拣。 6.用户友好性:借助简单的用户界面和易操作的软件平台(如VNC和Jupyter Lab),允许用户轻松监控和调整系统运行参数,提高了系统的可用性和用户体验。 三、作品完成情况: 从表中可以看出,在正常光照环境下,系统的平均识别准确率可达96.50%,在强光、弱光的环境下也分别有92%、93%的识别率,单项识别成功率也均在92%以上。这些结果表明系统能在不同的光照环境下准确地识别不同种类的垃圾,能够应对现实生活中的各种情况。
基于树莓派与六自由度机械臂的智能垃圾分拣系统


作品名称基于树莓派与六自由度机械臂的智能垃圾分拣系统
作品分类智能软硬件
参赛院校广西科技师范学院
指导老师田军南
团队成员陈樟柯、李伟、李佩霖、揭海、梁日东
奖项等级国赛一等奖
竞赛年份2024



