

作品名称水面水下协同作业平台
作品分类智能软硬件
参赛院校大连海事大学
指导老师袁国良、刘安良
团队成员胡家福、张旭舟、王思宁、柳晓磊、龚诗雅
奖项等级国赛一等奖
竞赛年份2024
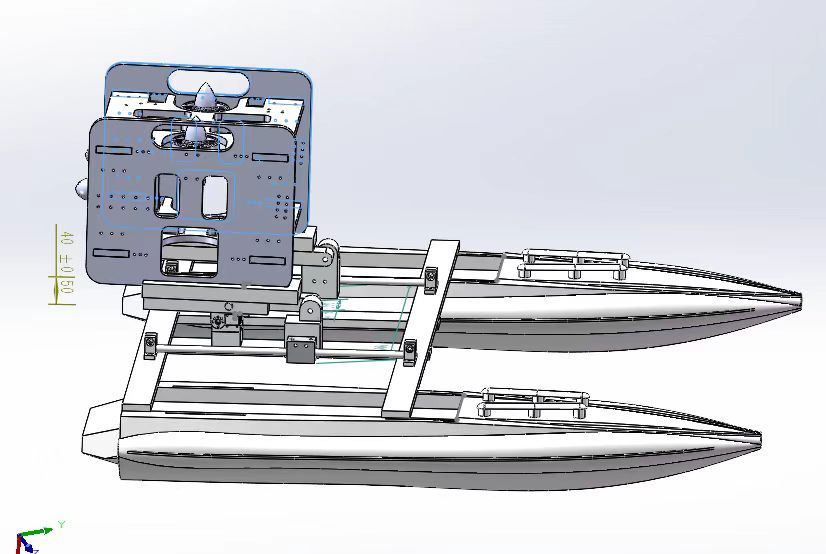
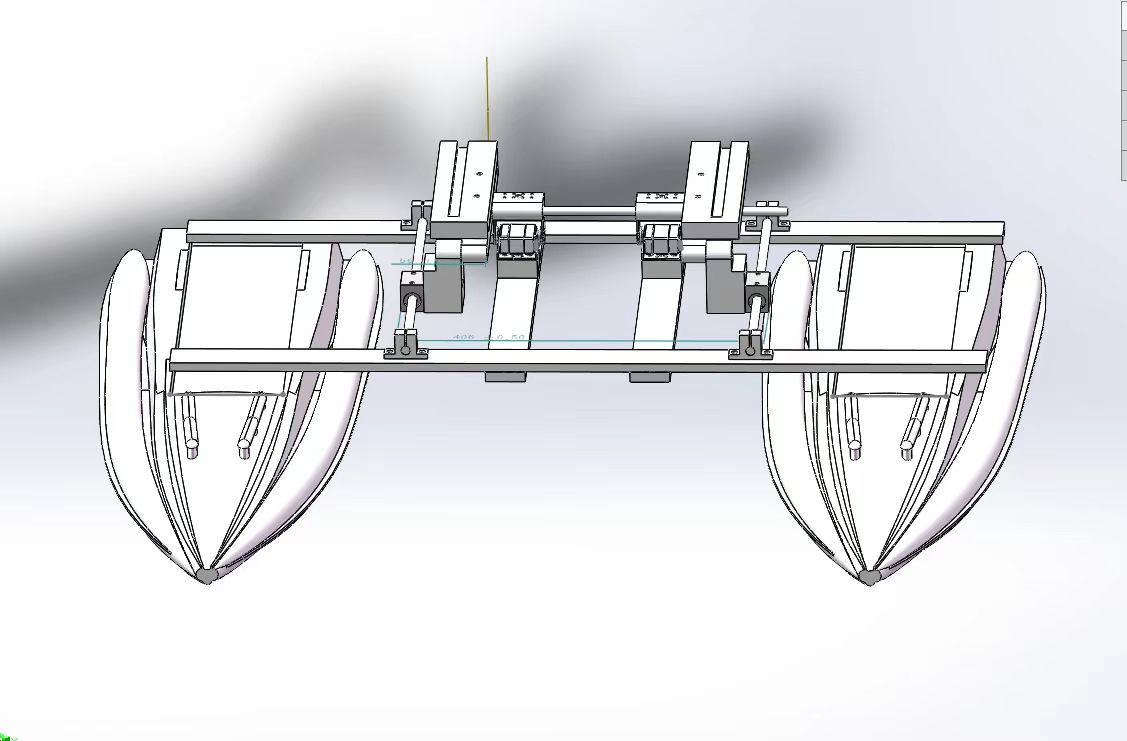
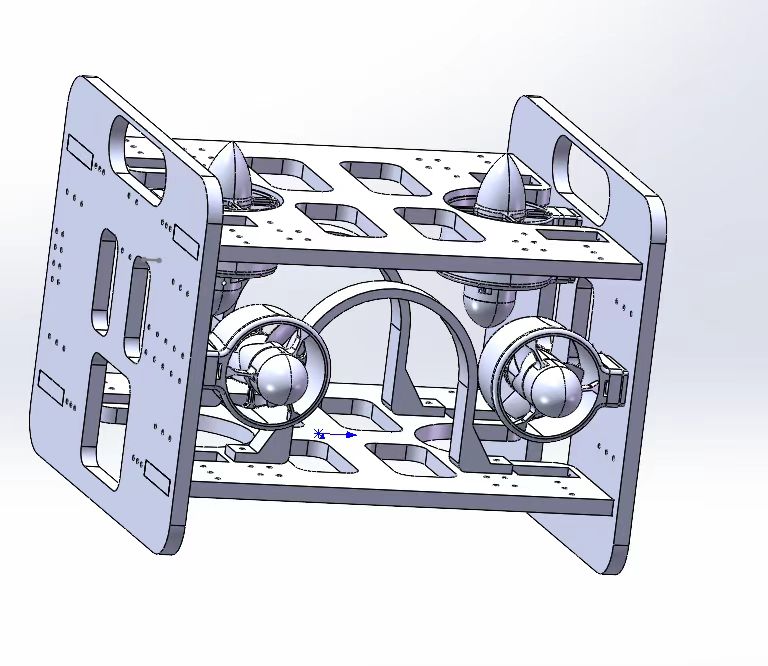
随着科学技术的飞速发展,自主水下机器人(ROV)正朝着产品化、产业化的方向快速前进。21世纪以来,布放技术作为限制ROV常态化应用的关键技术之一,也得到了显著的发展。在此背景下,ROV的应用领域不断扩大,越来越多的海洋科学家和海上石油探测人员需要利用ROV平台来执行各种任务。这不仅对ROV的布放和操作维护的便捷性、可靠性和安全性提出了更高的要求,而且随着ROV向长期集群水下作业的发展趋势,布放技术将面临更加严峻的挑战。我们团队基于此创建了一个水下水面协同作业平台。该平台,由无人船、布放装置、水下机器人三部分组成,其可以进行远程作业工作,当水下机器人(ROV)到达至指定区域,布放装置进行工作,将水下机器人(ROV)放至工作深度,水下机器人(ROV)即可开始工作,将海底的环境传至上位机,对海底环境进行监视。这项技术融合了无人驾驶船舶技术与水下机器人技术,旨在提高海洋资源勘探、环境监测、海底地形调查等领域的作业效率和安全性。我们的作品侧重于对水下环境,生物的探测。通过无人船携带水下机器人行驶到指定位置,使用布放装置放出水下机器人进行水下作业。在水产养殖方面,我们的机器人可以通过摄像头捕获水产的生长状态与大致数目。通过监测,还可以及时发现水产动物的异常行为或外观,预防病害的发生。无人船和水下机器人可以在恶劣天气下作业,保证养殖活动的连续性。



