


作品名称引视之伴-基于云GIS的感知仿生导盲机器人
作品分类智能软硬件
参赛院校天津科技大学
指导老师王嫄、杨巨成
团队成员周子尧、伍勤琴、杨馨怡、李雅各、刘晨
奖项等级国赛一等奖
竞赛年份2024
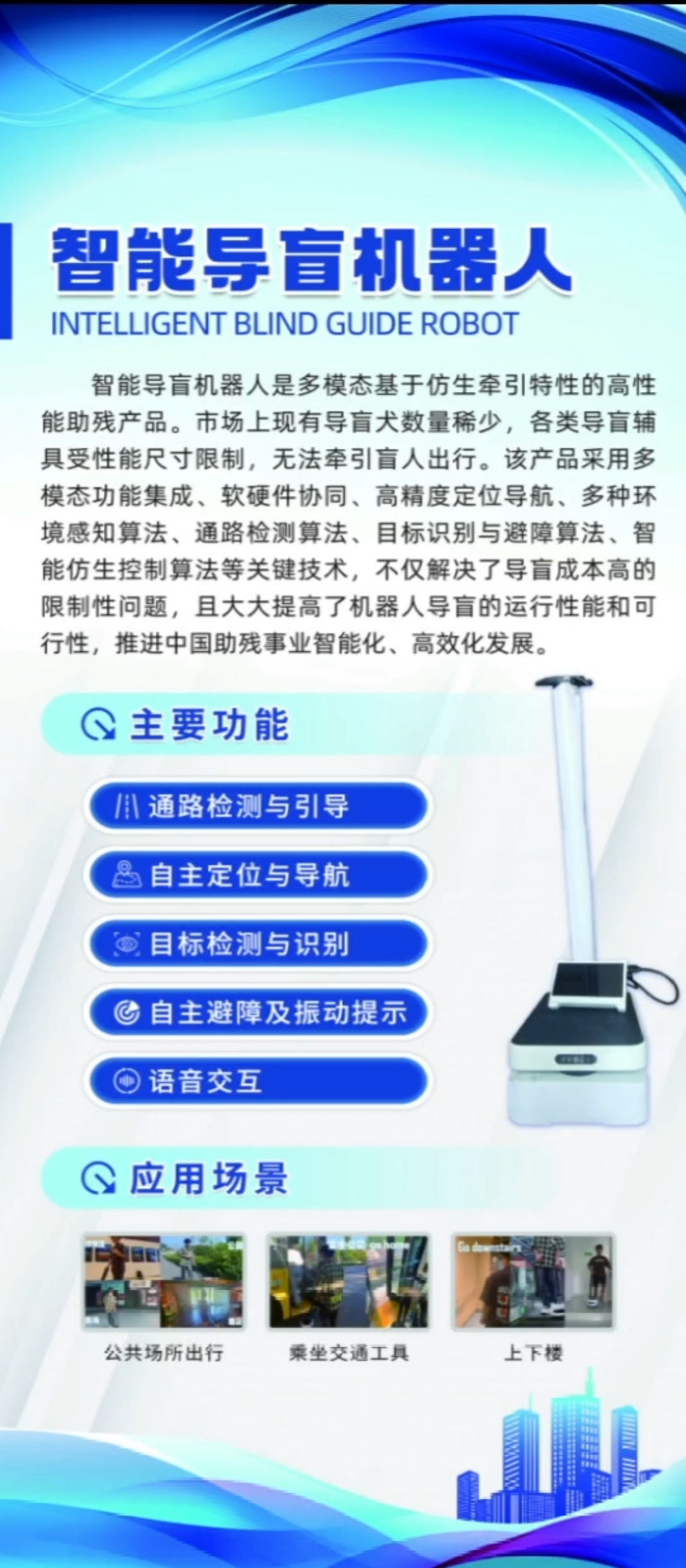
“引视之伴”团队致力于解决国内外盲人及视力障碍人士独立安全自由出行问题,为用户提供多元化的高性能智能导盲机器人设备及方案,可使视力障碍人士实现室内外独立安全自由行走。团队自主研发的两款融合GIS感知一体化的智能导盲机器人,采用融合机械装置、人工智能算法模型与云边端技术,让国内外视障人士独立安全自由出行成为了可能。团队还配套研发了云-端导盲大数据分析地图以及对应小程序,多项技术一体化实现,使得盲人及视力障碍人士出行难、成本贵等问题迎刃而解。这套智能导盲机器人技术方案可应用于多场景,实现效率高,鲁棒性强,使得盲人在出行和其他生活环节中更加便捷和安全,为推动残疾人事业发展、无障碍城市建设做出卓越贡献。 团队研发的导盲机器人凭借其“主动牵引、智能感知一体化”的技术优势,将产品服务于国内外广大盲人以及视力障碍人士。并依靠其高性价比和优质的产品服务赢得客户认可,致力于推动我国残疾事业以及康复辅具的发展,解决了成本高、难度大、可行性差等痛点。



