1.作品描述
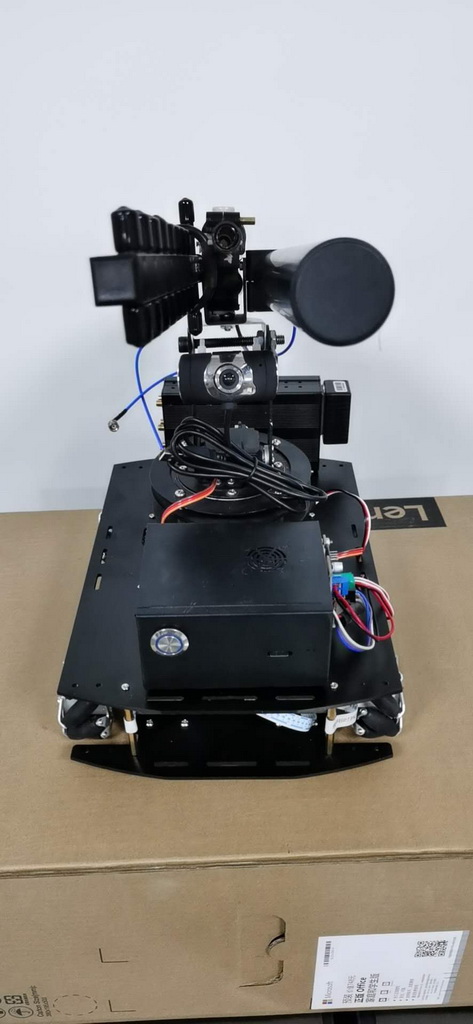
基于树莓派4B的反无人机移动平台的硬件系统由视觉探测系统、无线电射频干扰系统与载具平台构成,选取树莓派作为主控单元,控制二自由度云台摄像头对无人机目标识别跟踪,并通过拓展控制板将驱动信号同步至干扰模块,完成对目标的跟踪干扰。 我们将具体围绕“作战保障,智能化战场”这一研究核心,从“军用” 和“民用” 上对项目的整体研发战略、自主运行能力和功能开发等方面进行深入探讨,并对不同系统进行设计和比较,以满足具体的实践需要。最后,我们将对平台上面的对作战平台硬件体系各个单元进行了性能评估,以保障实际环境下能够正常运行和较高质量的工作效率。
2.创意来源
近年来,随着无人机技术的不断发展与完善,无人机不仅在军事和民用领域得到了广泛应用。然而随着无人机制造成本的降低,无人机的逐步智能化,越来越多的非法操控者使用无人机来扰乱社会治安。甚至一些军工厂和研究院附近也有不明飞行物出没,给社会稳定和国家安全带来了重大危害。因此亟需对无人机的“滥飞”、“黑飞”等行为进行有效管制。 针对上述问题,本轮项目从硬件、软件方面着手设计反无人机平台,组装自主反无人机平台,无人机干扰枪。这些平台采用模块化设计,由机体单元和作战模块单元两大部分组成,可维护、升级性能强。
3.运行环境
1.硬件方面:拥有科技创新研发实验室,测量与信号发射设备、硬件制作和电子设计等方面条件充分。
2.调试环境:Linux操作系统,Windows操作系统、Android操作系统
3.运行环境:主要面向机场、场站等需要纯净空域的场合,对无人机进行干扰反制。
声明:此文版权归原作者所有,若有来源错误或者侵犯您的合法权益,您可通过邮箱与我们取得联系,我们将及时进行处理。邮箱地址:mail@cmit.cn