1.作品描述
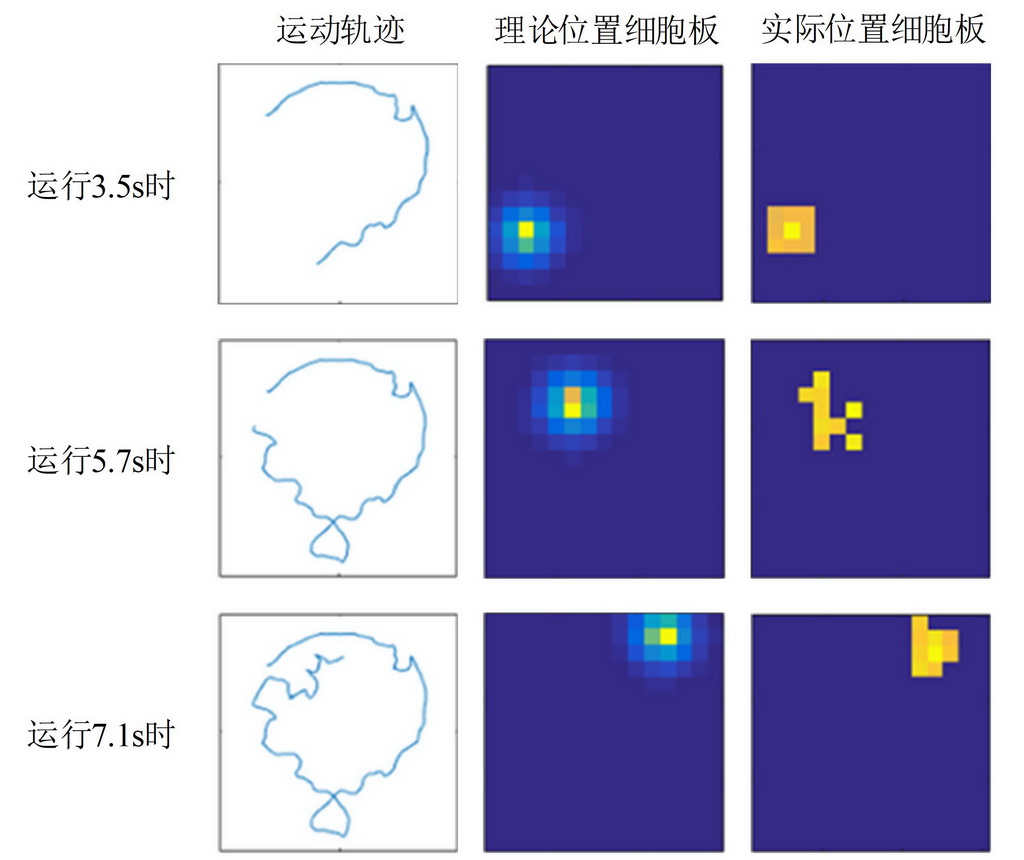
本设计拟基于大鼠对环境的感知和认知机理,面向自主移动式机器人对未知环境的自主探索和面向特定情景目标的导航问题,构建仿鼠脑内嗅—海马认知机理的自主移动机器人环境认知与导航模型。首先通过RGB-D摄像头采集环境的图像信息与自运动信息,一方面将机器人系统的编码器与陀螺仪采集到的自运动信息输入至鼠脑内嗅—海马神经计算模型,激活自运动位置细胞进行放电活动,得到机器人的精确位姿;另一方面构建视觉图库,根据机器人采集到的当前头朝向方向上的视觉信息,与视觉图库中的视觉模板进行相似度匹配,激活视图细胞进行放电活动,得到情景相似度信息,融合内嗅—海马神经计算模型和视觉通路计算模型的输出信息,构建情景记忆单元模型并生成精确的环境认知地图,再利用改进Dijskstra算法在认知地图上实现全局路径规划,实现机器人面向目标的导航。
2.创意来源
传统的行为学习方法已经无法满足人类对机器人智能的要求,难以为复杂未知环境下的机器人导航提供足够的导航信息,智能机器人领域迫切需要一些新的思路和方法来突破现有方法的瓶颈。尽管人类和各类高等哺乳动物每时每刻都要面临着大量的感知数据,却总能以一种灵巧的方式获取信息,认知环境。人类和这些动物都具有丰富的感觉器官,能在外界环境中获取视觉、听觉、嗅觉、触觉、味觉刺激,并由神经中枢系统做出响应。尤其是人类大脑能够从感知信息抽象出对周围环境的整体性知识,形成对环境的理解,从而实现更为复杂的智力活动。 在研究哺乳动物大脑的过程中,大量的神经生理学和神经解剖学研究发现人和动物的环境认知、记忆与导航的任务是由大脑皮层中海马体承担,且其对于环境的空间表征和记忆特定事件或情景记忆的能力是必不可少的;海马体通过提供一个空间和时间框架来联系经验,创建一个有机体经验世界的认知地图,而认知地图则是外界环境的内在的神经表达。本设计试图在神经解剖学、认知机器人学、认知发育机器人学的理论体系中,以啮齿目动物(主要是老鼠)的海马体和运行机制为基础,对基于生物视觉和鼠脑内嗅—海马认知机理的自主移动机器人环境认知与导航模型进行研究。
3.运行环境
1、 MATLAB R2018B
2、 Visual stdio 2017
声明:此文版权归原作者所有,若有来源错误或者侵犯您的合法权益,您可通过邮箱与我们取得联系,我们将及时进行处理。邮箱地址:mail@cmit.cn