1、作品名称
智慧工厂机器人巡检系统——基于YOLO V3智能图像识别移动式巡检系统
2、作品分类
其他
3、作品描述
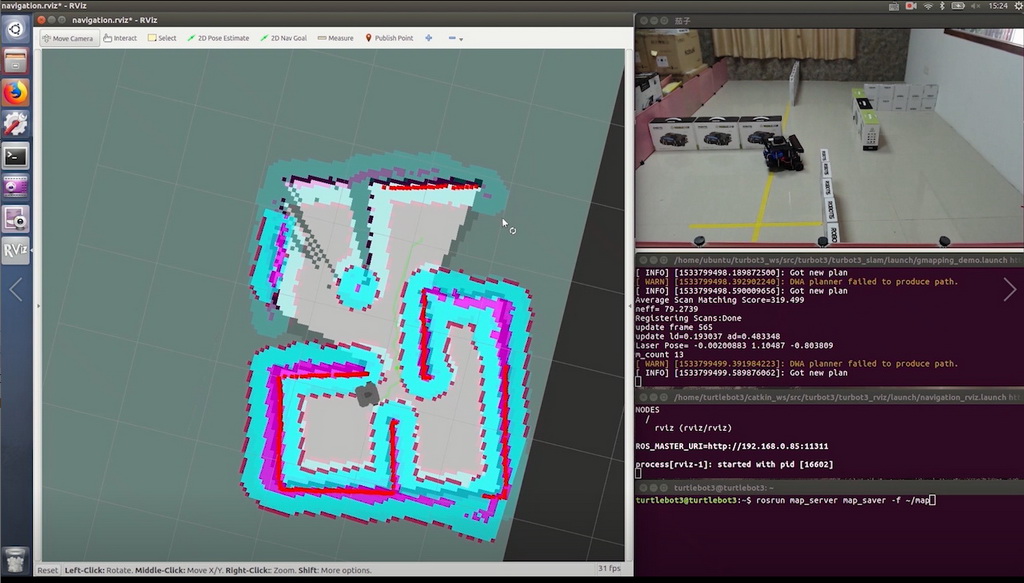
本作品以基于ROS的turtlebot3机器人为载体,实现工厂的巡检管理,包括基于YOLO V3的安全帽识别、工人跌倒行为识别(立即发出警报)以及仪器仪表数码识别,将识别结果上传于信息管理网站,实现对工人工作规范进行评比,对仪器仪表数码进行统计。 本作品是通过研究机器人路线规划、自主导航、视觉检测等技术来开发一款智能工厂巡检机器人,具体功能有: (1)实现turtlebot3机器人自主导航; (2)实现turtlebot3机器人安全帽识别; (3)实现turtlebot3机器人进行跌倒行为识别; (4)实现turtlebot3机器人进行仪器数码识别与读取; (5)设计信息管理网站,实现巡检工作的人机交互。
4、创意来源
当前,以信息物理系统技术为核心的第四次工业革命浪潮正在席卷全球。而作为工业4.0的最大主题,智慧工厂可谓贯穿产业升级全过程。 在智慧工厂中,机器人带来的自动化与智能化又不仅仅是纯粹的自动化和智能化,而是转换成更为智慧化的人机协同。 通过智能机器人的运用,不仅可以节省人力成本,提升企业巡检效率问题,同时为企业带来本质安全、对便捷员工生活、工作和提升社会效益等方面都有积极意义。 在目前的工厂管理中,未佩戴安全帽存在安全隐患,当坠落人员无人发现时,无法得到及时救治而加重伤情,工厂仪表数量多,人工检测效率低。至此,我们发明一款移动式巡检机器人,来对工厂进行智能化、自主化管理。
5、运行环境(所需操作系统、硬件、软件等)
操作系统:Ubuntu 20.04.1 LTS 硬件:基于ROS的turtlebot3机器人
声明:此文版权归原作者所有,若有来源错误或者侵犯您的合法权益,您可通过邮箱与我们取得联系,我们将及时进行处理。邮箱地址:mail@cmit.cn