作品名称:
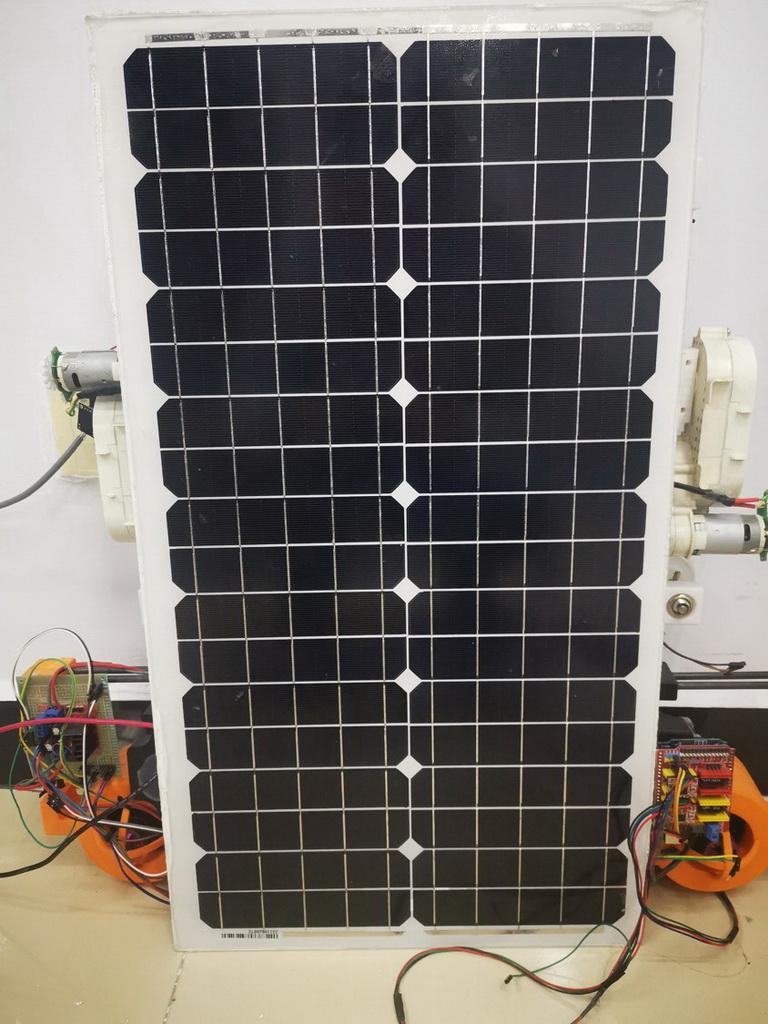
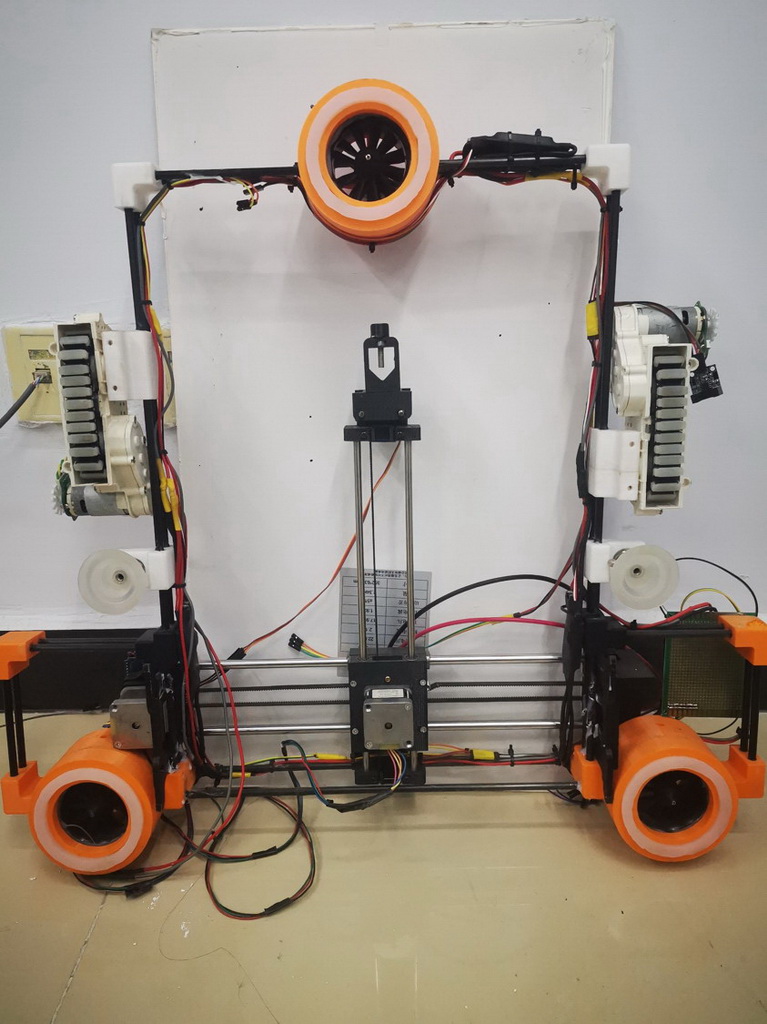
光伏板智能高楼清洗机器人
参赛院校:
河北建筑工程学院
指导老师:
王甜甜、温晓东
团队成员:
宋英杰、李记刚、卢瑞东、周运堂、曹鼎业
奖项等级:
国赛一等奖
竞赛年份:
2021
作品描述:
本项目是采用三腔体吸附的太阳能爬壁机器人,该机器人的设计基于负压吸附原理,由三个无刷电机组成的三腔体排风形成负压,使机器能够在玻璃壁面上自由移动,移动模块则采用履带式车体,通过用ESP8266wifi模块控制其移动,采用传感器和摄像头通过wife模块实时传输信息,还拥有自动控制系统,通过陀螺仪来读取当前机器人的位置信息,然后生成机器人下一步的步态,自动行驶。