


作品名称:
管道外壁巡检机器人
参赛院校:
山东科技大学
指导老师:
曲岩、杨治宽
团队成员:
王宗浩、李菲、孟小源、李昱霖、杨茗介
奖项等级:
国赛一等奖
竞赛年份:
2023
作品描述:
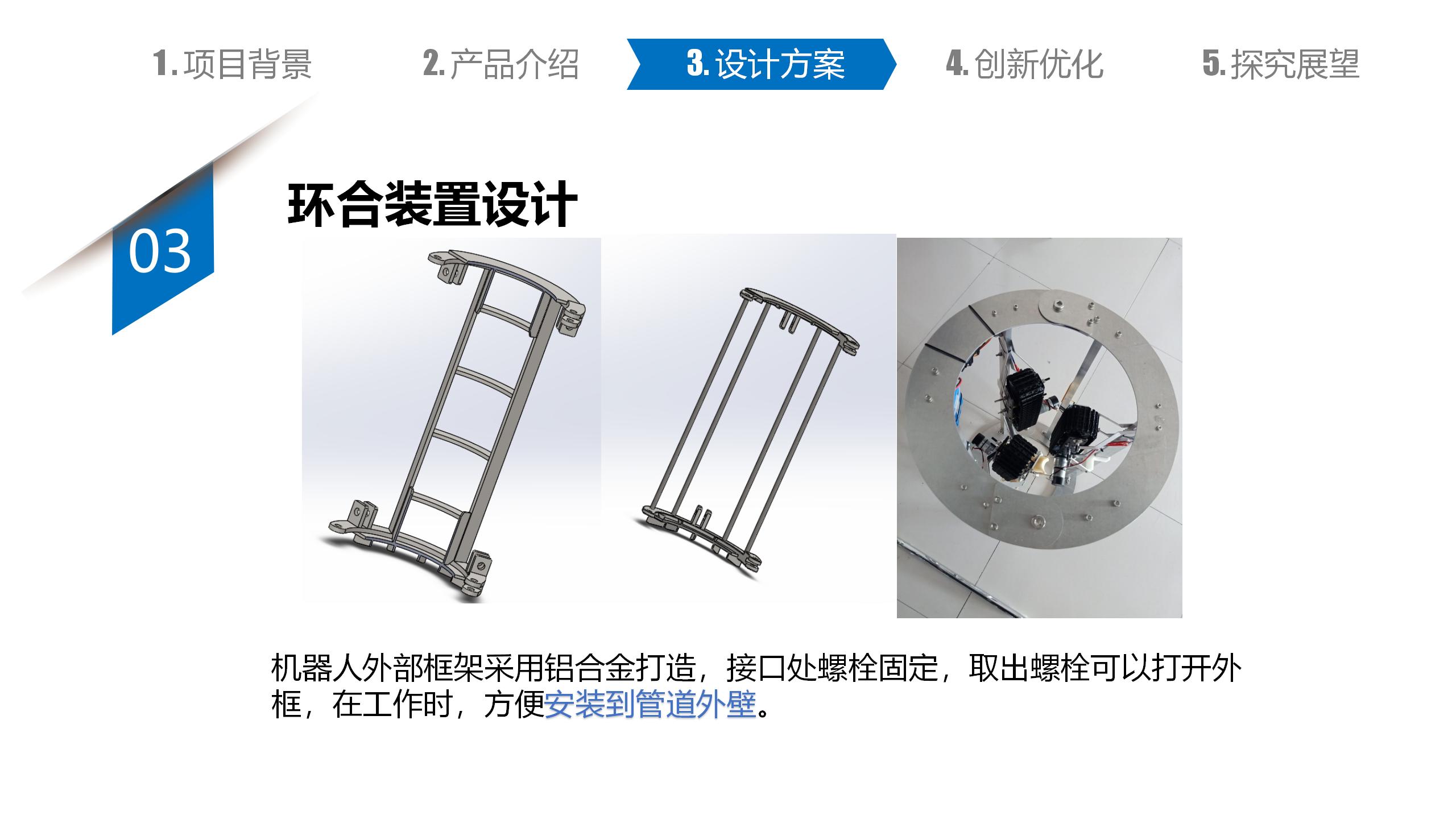
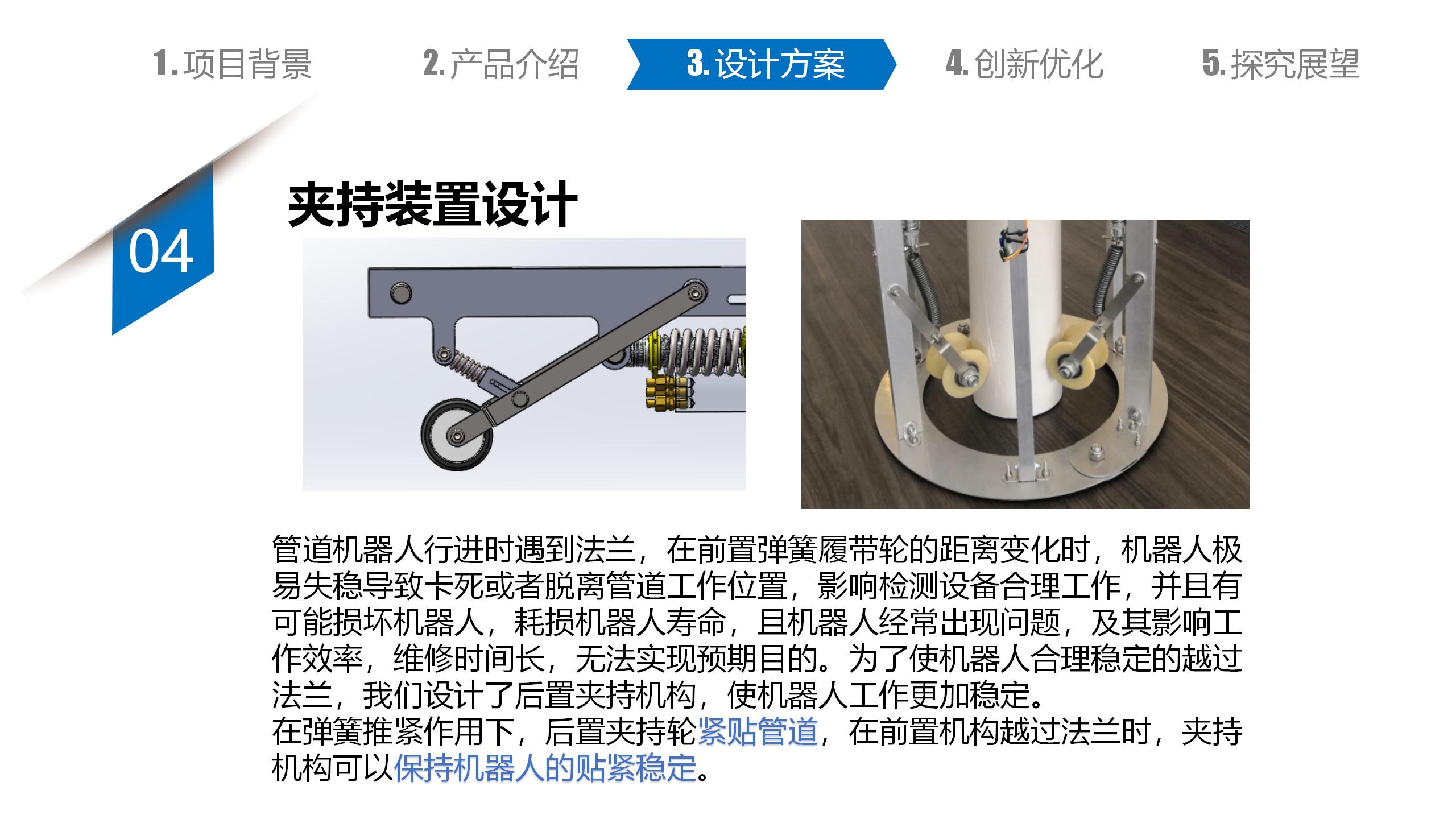
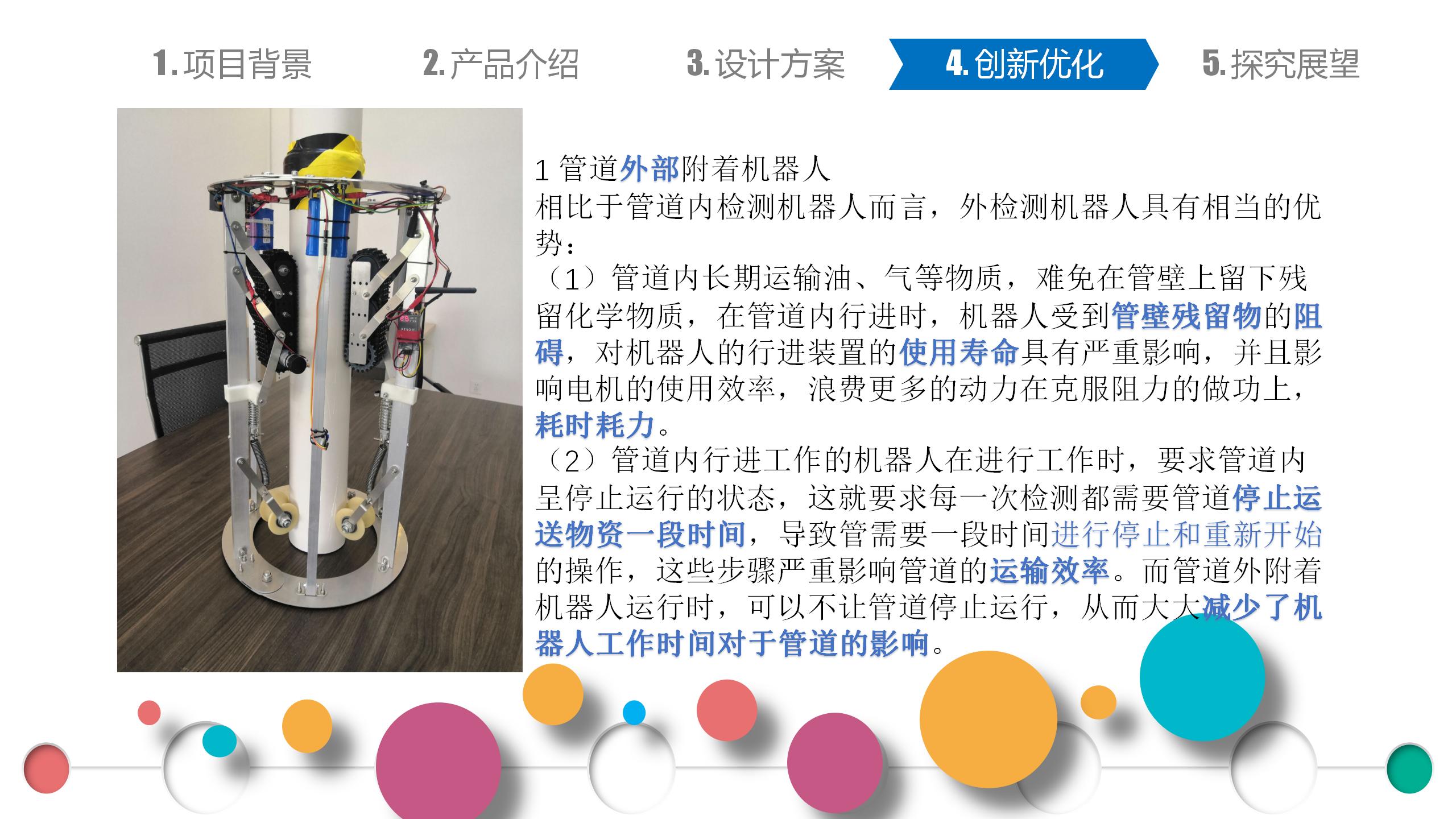
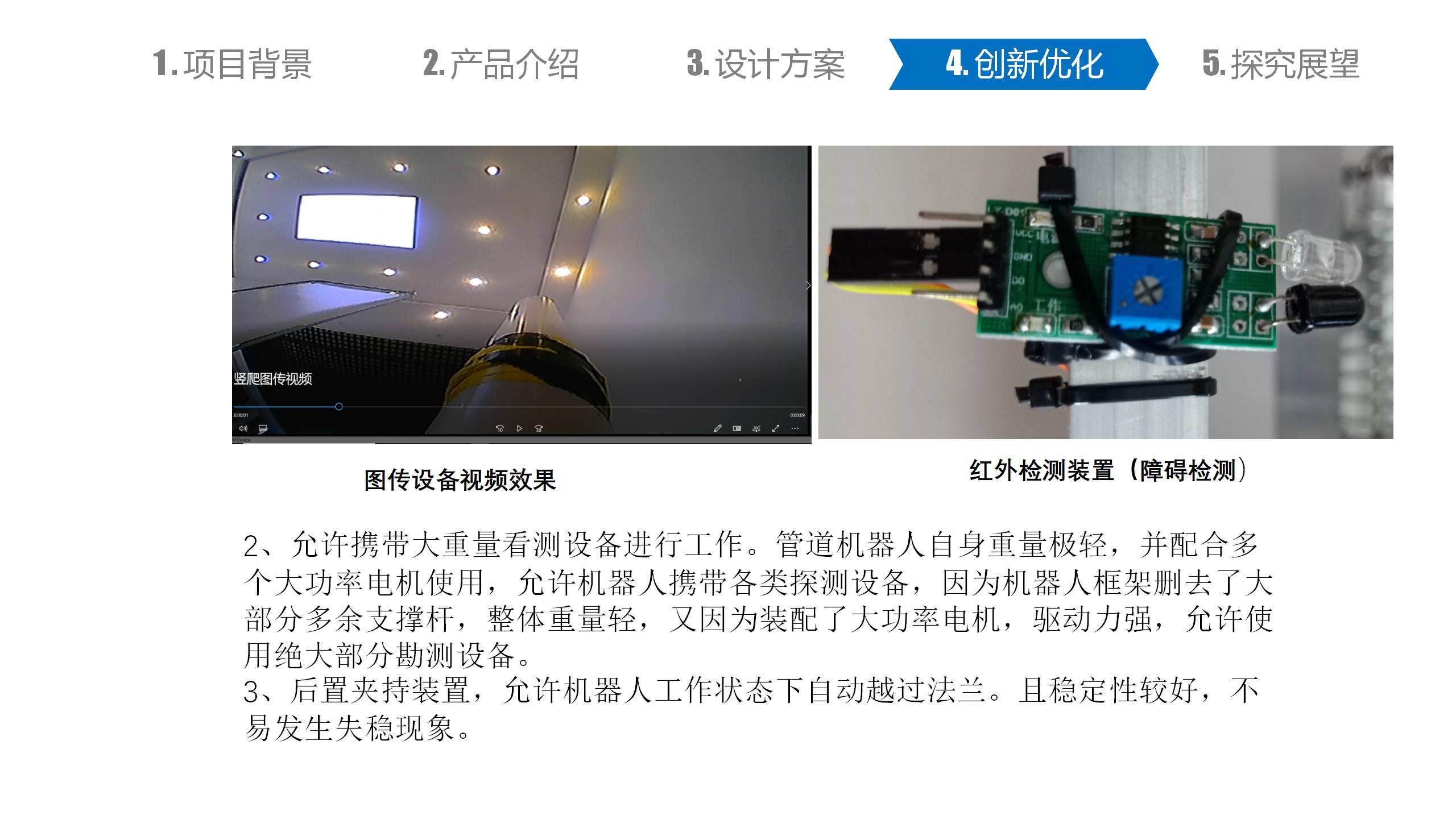
本设计的管道外壁巡检机器人,应用于管道的外部勘测和检查,适应于裸露工作条件下的管道维护检修,主体机身运用大动力电机,载重量足够机器人装配各类检测设备,因为其工作于管道外部,允许在管道持续供给过程中进行检查工作。后置夹持装置,结合其外部运动经过法兰的特点,允许机器人实自动越过法兰,不需要中断工作。